Ollama是個在macOS, Windows和Linux系統上執行 LLM(Large Language Model,大型語言模型)的開放原始碼專案,也是迄今最易用的方案,適合用於不允許或不方便使用線上AI服務(如:ChatGPT)的場域。
Ollama是個在macOS, Windows和Linux系統上執行 LLM(Large Language Model,大型語言模型)的開放原始碼專案,也是迄今最易用的方案,適合用於不允許或不方便使用線上AI服務(如:ChatGPT)的場域。
《超圖解ESP32應用實作》新書初稿已經完成,尚未編排,內容涵蓋PID控制、編寫硬體中斷事件類別程式庫、擴充微控器的輸入介面、PlatformIO IDE開發工具、AI程式設計助理、JTAG偵錯介面、CAN匯流排應用、ESP32-S3/S2開發板的內建USB介面實作…等主題。
受限於物理結構,手機很難拍出單眼相機的景深效果,通常要距離被攝物體很近,像底下攝於奧地利哈修塔特(Hallstatt)的照片,不然只能靠演算法或者影像處理軟體後製。小米於2021年推出的MIX 摺疊手機有搭載類似人眼晶體結構的「液態鏡頭」,而Sony自Xperia 1 IV開始配備潛望式光學變焦鏡頭,加上日益強大的AI處理器和演算法,手機的成像品質越來越讓人驚豔。

這是疫情管控鬆綁之後的第一個暑假旅遊旺季,雖然各地秀麗的風光,彈指間搜一下就有,但瀏覽照片和影片,沒有多元感官體驗也不會留下回憶。六月中旬和家人參加旅行團到奧地利、捷克和德國,循著光啟航,去尋找詩和遠方。本文的照片只有調色和裁切,沒有刪除或添加任何元素。

之前看到一款附帶58mm相機濾鏡接口的S22 Ultra保護殼,覺得蠻實用的,其它廠牌的手機也有類似的保護殼。因為濾鏡保護殼的結構很簡單,所以自己用普通的保護殼改裝了一個,下圖中間的白色殼即是成品,右邊兩個濾鏡是CPL偏光鏡和ND減光鏡。

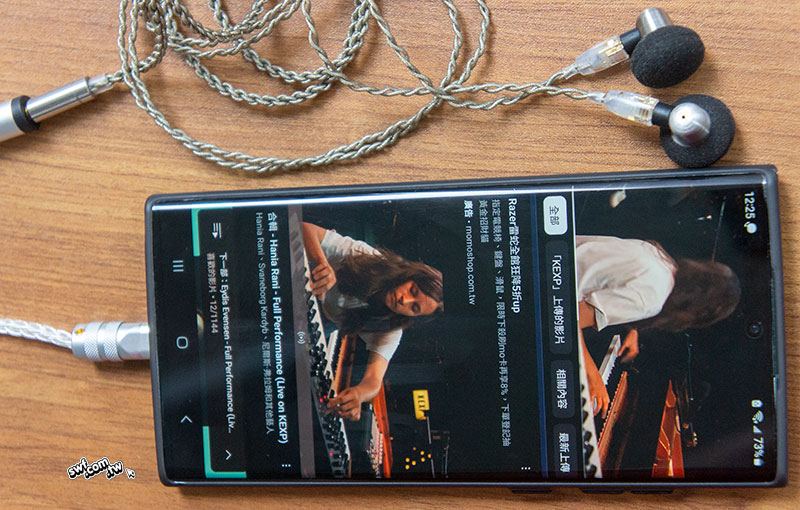
S22 Ultra手機需要額外購買一個Type-C轉3.5mm插座轉接頭,才能接有線耳機。但S22 Ultra以及多款採用相同晶片的安卓手機,都沒有內建DAC(數位類比轉換器),所以有線耳機的轉接線必須購買具備DAC晶片的款式,否則無法輸出聲音。
以前買了QCY T1給女兒,我自己用小米青春版,兒子用三星Galaxy Buds Live;後來賣掉MacBook Air M1(16GB/256GB)附贈的AirPods 2,買了紅米Redmi Buds 4 Pro給女兒,我接手QCY T1。

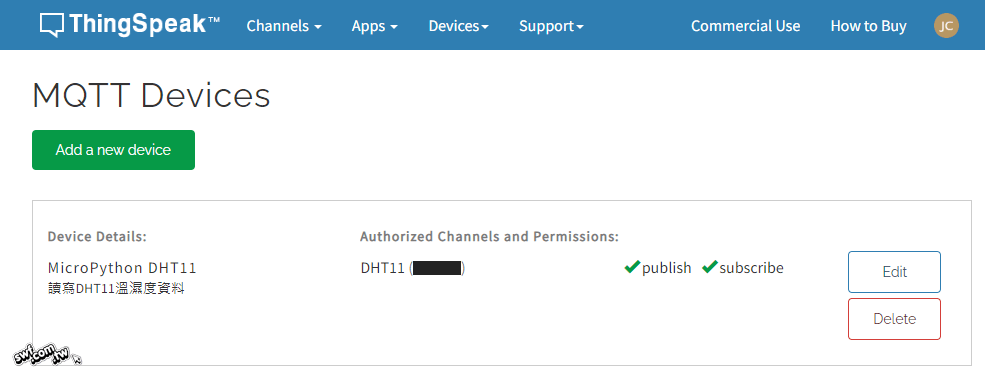
ThingSpeak雲端平台修改了MQTT服務的設置方式,本文將說明取得MQTT密碼的步驟,以及在ESP8266控制板(如:NodeMCU或Wemos D1 mini)執行Arduino和MicroPython,透過MQTT協定上傳DHT11溫溼度資料到ThingSpeak的程式碼。
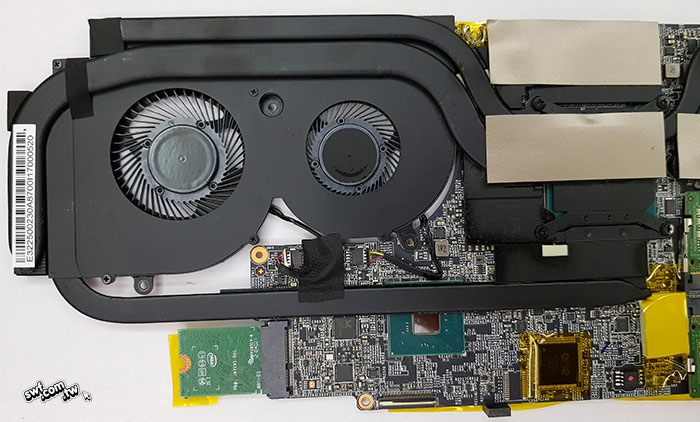
2018年購入的MSI 微星GS63 Stealth 8RE-053TW 電競筆電,最近一個風扇傳出摩擦的噪音,應該是轉軸偏移造成的。距離上次拆機清理風扇、升級SSD硬碟也過了一年了,有些專業用戶建議,除了定期清理風扇,處理器和GPU散熱片之間的散熱膏也應該要定期更換,大約一年一次。
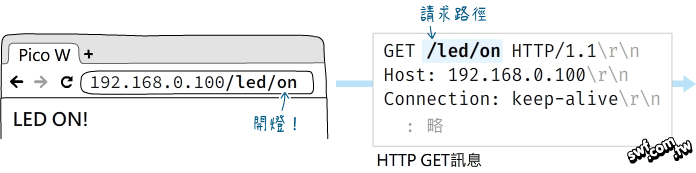
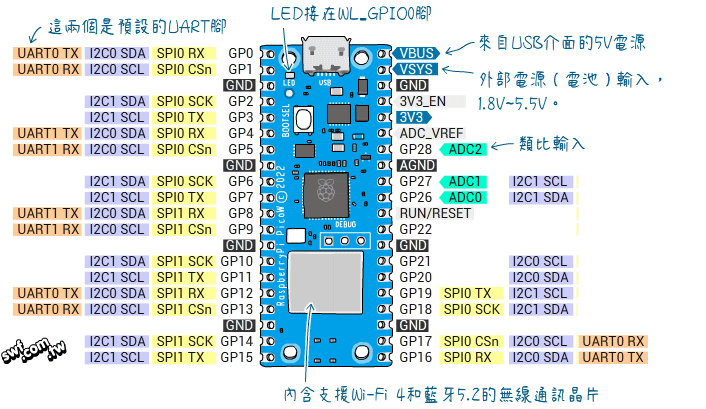
Raspberry Pi Pico W開發板(以下簡稱Pico W)相較於Pico板,重點當然是Wi-Fi無線通訊功能。使用MicroPython編寫Wi-Fi通訊相關應用,程式跟ESP8266及ESP32的寫法完全相同。本文介紹的三個程式分別改自《超圖解Python物聯網實作入門》第6, 16和17章的範例。
Raspberry Pi Pico W搭載Infineon公司的AIROC CYW43439無線通訊晶片,具備2.4 GHz Wi-Fi 4(802.11n,支援WPA3)和Bluetooth 5.2,但此開發板的韌體缺乏藍牙驅動程式,因此暫不支援藍牙,官方未來將會釋出驅動程式。
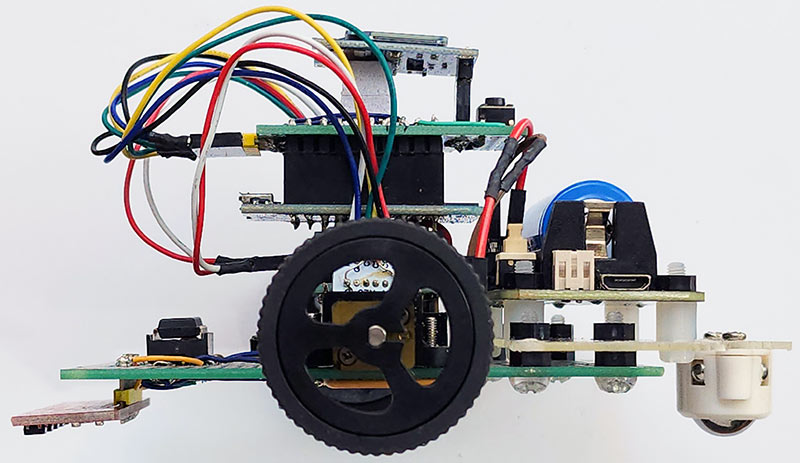
電池的鎳片是透過點銲方式與電池相接,我原本打算嘗試不用電烙鐵,直接把鎳片從電池扯下來,再換上新電池。結果,用一字起子只能勉強撬開正電源接點的鎳片,另一邊,負極的鎳片…扯不下。

Begin typing your search term above and press enter to search. Press ESC to cancel.