設定讓XBee模組傳送腳位狀態時,它每次都會傳出它自身的位址和全部腳位狀態,並且包裝成如下的API訊息框格式:
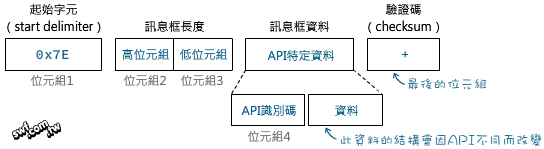
訊息框能夠傳送多種不同類型的資料,例如,代表模組腳位狀態的資料,或者控制遠端裝置的AT命令。為了分辨訊息框的資料類型,XBee模組規定了一系列不同的API識別碼。
設定讓XBee模組傳送腳位狀態時,它每次都會傳出它自身的位址和全部腳位狀態,並且包裝成如下的API訊息框格式:
訊息框能夠傳送多種不同類型的資料,例如,代表模組腳位狀態的資料,或者控制遠端裝置的AT命令。為了分辨訊息框的資料類型,XBee模組規定了一系列不同的API識別碼。
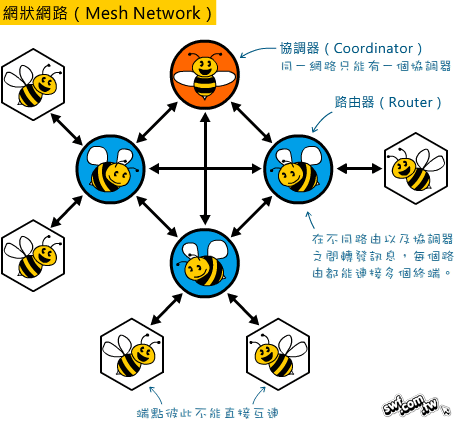
讓一個通訊節點對其餘所有節點發送訊息,稱為「一點對多點廣播」。
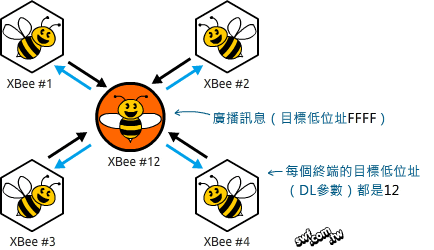
假設ZigBee網路上包含5個XBee模組,協調器的DL參數(目標低位址)設定成FFFF(代表「廣播」),其餘4個模組的DL參數則設定成協調器的位址(此例為12)。
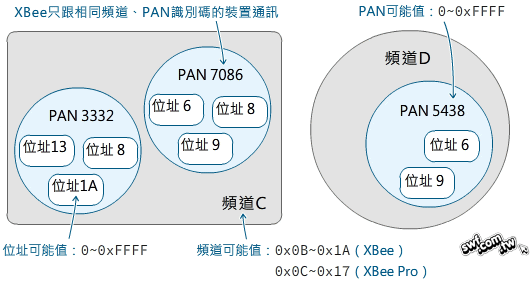
「點對點(一對一)」是連接兩個XBee模組最簡單的方式。
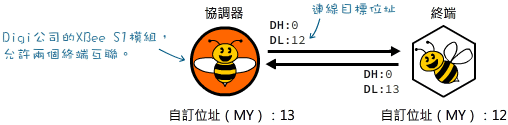
在ZigBee協定中,兩個終端不能直接相連,點對點連線的其中一端可以是終端(Endpoint),另一端則須是協調器(Coordinator)或路由(Router),但Digi公司的XBee S1模組,允許兩個終端互聯。
讀者詢問如何在Arduino中建立數個自訂函式,並且透過「函式指標陣列」,在不使用if…else或switch…case等條件判斷式的情況下,讓程式依據變數的值,執行不同的自訂函式。
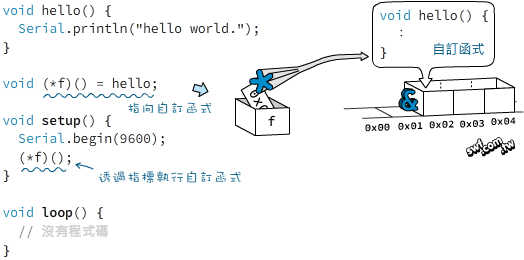
下文將先介紹Arduino與C程式語言的函式指標語法。
XBee裝置可透過「序列埠通訊軟體」連線,並以AT命令設置參數。或者,採用Digi公司提供的X-CTU軟體設置。新版的X-CTU軟體支援Windows, Mac OS X及Linux系統,請在Digi公司的X-CTU網頁下載並安裝。
ZigBee是在IEEE 802.15.4標準上,加入路由和其他聯網功能。ZigBee的名稱源自蜜蜂(bee)發現蜜源時,會跳「8字舞(waggle dance)」來告訴同伴方向和距離。ZigBee通訊協定由ZigBee聯盟合作開發,適合商業和工業的各種低數據傳輸率應用。
本單元電路將取代Arduino的USB有線序列埠,因此HC-05模組接在Arduino的數位0與1腳。
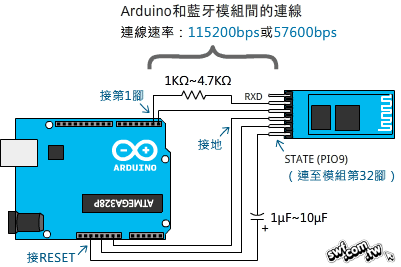
先讓電腦與藍牙模組配對,再開啟Arduino(我用行動電源接電給Arduino)。接著就和往常一樣,選擇連接到電腦的藍牙序列埠,即可上傳程式碼。
本文旨在補充《超圖解Arduino互動設計入門》第二版的更新內容與勘誤。
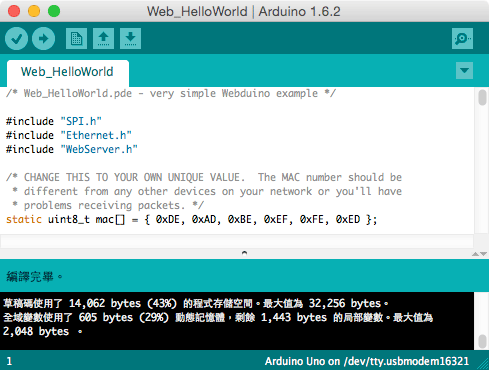
網站伺服器通常都是基於固定IP位址,不過,許多人的住家以及校園內的網路,都是採用動態IP(也就是由IP分享器指派IP位址)。為了方便執行Arduino網路程式實驗,程式可改成動態IP模式……
本文將示範讓兩個Arduino控制板透過藍牙連線傳遞訊息。
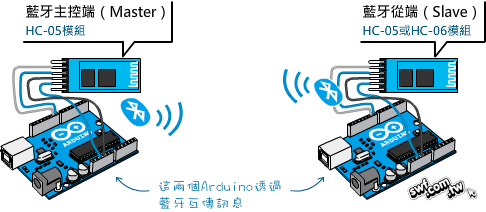
HC-05模組可以透過AT命令,設定成「主控端(Master)」或「從端(Slave)」;HC-06模組只能當「從端」。因此在配對連線實驗中,至少要有一個HC-05模組。
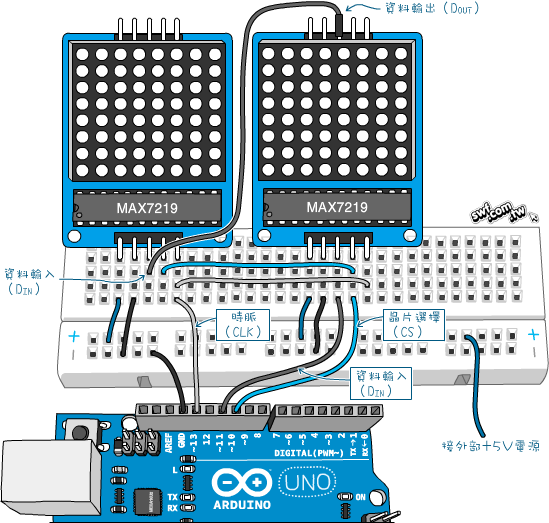
MAX7219 IC第1和24腳,分別是序列資料輸入及資料輸出,因此這個IC和74HC595一樣,都能串接在一起(請參閱「串入並出的IC 74HC595補充說明:串聯多個74HC595 的Arduino程式示範」)。
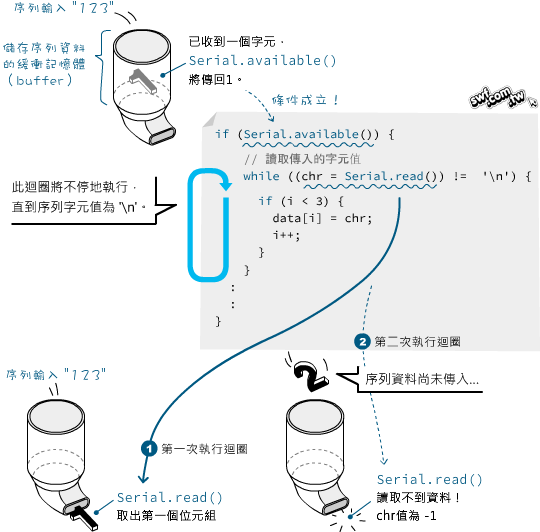
本文旨在補充《超圖解Arduino互動設計入門》第五章「序列埠通訊程式」,以及第十章「透過序列埠調整燈光亮度」的讀取序列埠值。動手做10-3與10-4的程式碼,都有一個判斷傳入值是介於’0’~’9’的條件式…
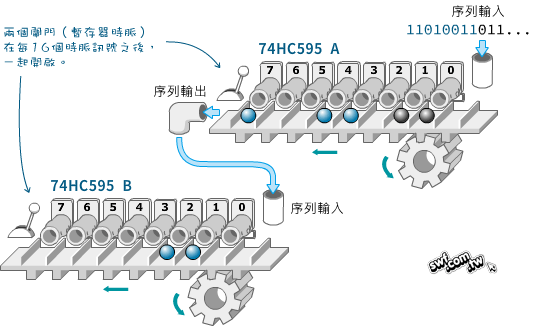
本文旨在補充《超圖解Arduino互動設計入門》第7章「序列連接七段顯示器」。74HC595具有一個串聯輸出腳位(第9腳),將它接在下一個74HC595的序列輸入腳,即可串聯成一組多重並列輸出埠。
Begin typing your search term above and press enter to search. Press ESC to cancel.