在Thonny IDE的互動環境(Shell)操作MicroPython開發板的方式,跟使用其他序列埠通訊軟體(如:PuTTY)不太一樣。使用序列埠通訊軟體連線,貼入程式碼之前,需要先按一下Ctrl+E鍵,互動環境(Shell)不支援Ctrl+E鍵,直接在其中按Ctrl+V鍵貼入程式碼即可:
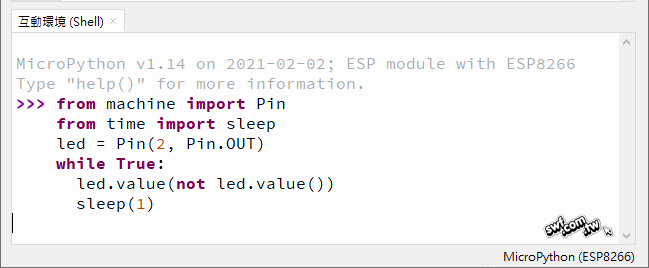
你可以複製這段閃爍LED程式碼測試看看(請自行修改LED接腳編號):
from machine import Pin from time import sleep led = Pin(2, Pin.OUT) while True: led.value(not led.value()) sleep(1)
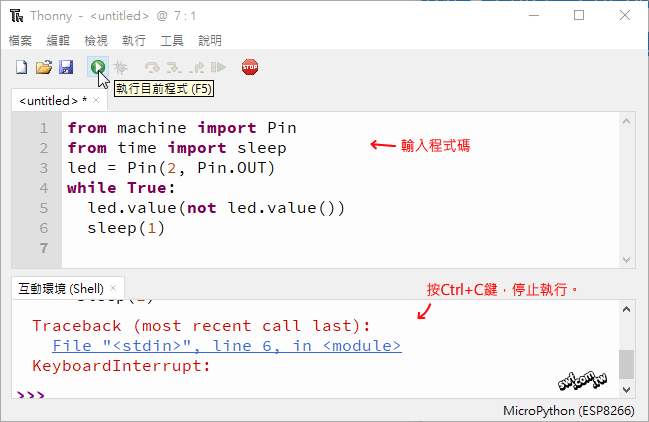
在互動環境(Shell)中按下Ctrl+C鍵中斷執行。
上傳MicroPython程式碼到開發板
在程式編輯器輸入或貼入程式碼,按下工具列上的「執行目前的程式」鈕:
它將問你要把程式存在哪裡?
請選擇「MicroPython設備」,然後輸入檔名。從底下這個面板可以看到開發板快閃記憶體裡面包含一個boot.py檔。
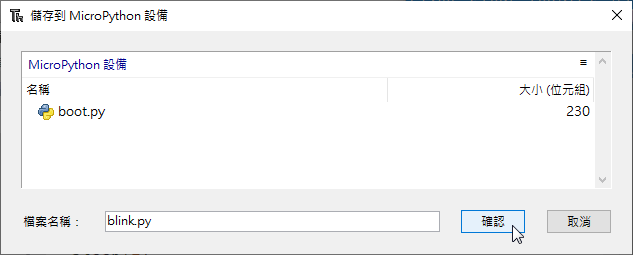
如果你打算讓開發板一開機就執行你的程式,請將它命名成main.py;我將它命名成blink.py。
按下「確認」,Thonny就自動把檔案上傳(燒錄)到開發板,並自動在互動環境(Shell)執行這個命令” %Run -c $EDITOR_CONTENT”,代表「執行當前編輯器視窗裡的程式碼」。
存檔時,若選擇把檔案存在「本機」,同樣也可以在開發板執行目前編輯器視窗裡的程式碼;Thonny會在背地裡把程式碼傳給開發板執行。
管理開發板的檔案
選擇主功能表的「檢視→檔案」指令,開啟檔案面板,它將呈現MicroPython開發板的快閃記憶體內容。
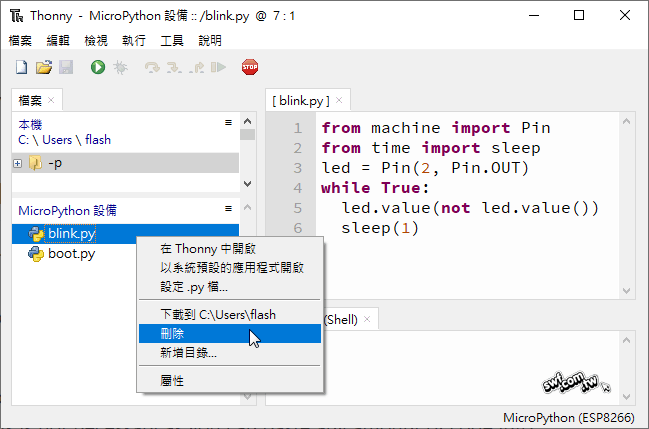
在檔案面板中按滑鼠右鍵,可執行刪除檔案、新增目錄、查看檔案屬性(檔案大小)…等指令。若選擇「刪除」指令,它會詢問你是否確認刪除:
按下「是」鈕,檔案就從開發板的快閃記憶體中刪除了。
老師好,我試過以上閃爍燈泡的範例,是可以執行的(也可以存入),但是開啟舊檔中mfrc522.py時,shell 只會出現
>>> %Run -c $EDITOR_CONTENT
>>>
的情況,而且按下control C也沒有任何反應,請問這樣要麼解決?
因為那個是驅動RFID模組的程式庫,要搭配主程式運作,煩請參閱書本內文說明。
老師好,我已經丟主程式(main.py)跟驅動模組(mfrc522.py)至D1 mini控制板,但是執行main.py時shell顯示 Warning: SPI(-1, …) is deprecated, use SoftSPI(…) instead
我的接角也都按書上的接,請問一下是什麼問題?
“Warning”是個警告訊息,不會影響程式運作,而 SPI(-1, …) is deprecated, use SoftSPI(…) instead 這段訊息的意思是 SPI() 不建議在新版本的韌體中使用,請改用SoftSPI。剛剛測試執行附錄 C 裡的 read_rfid.txt 程式碼,沒有問題:
要改用SoftSPI也很簡單,把 mfrc522.py 當中的 SPI 改成 SoftSPI 即可,修改後的 mfrc522.py 檔案原始碼如下,執行它就不會出現警告訊息了。
from machine import Pin, SoftSPI from os import uname class MFRC522: OK = 0 NOTAGERR = 1 ERR = 2 REQIDL = 0x26 REQALL = 0x52 AUTHENT1A = 0x60 AUTHENT1B = 0x61 def __init__(self, sck, mosi, miso, rst, cs): self.sck = Pin(sck, Pin.OUT) self.mosi = Pin(mosi, Pin.OUT) self.miso = Pin(miso) self.rst = Pin(rst, Pin.OUT) self.cs = Pin(cs, Pin.OUT) self.rst.value(0) self.cs.value(1) board = uname()[0] if board == 'WiPy' or board == 'LoPy' or board == 'FiPy': self.spi = SPI(0) self.spi.init(SPI.MASTER, baudrate=1000000, pins=(self.sck, self.mosi, self.miso)) elif board == 'esp8266': self.spi = SoftSPI(baudrate=100000, polarity=0, phase=0, sck=self.sck, mosi=self.mosi, miso=self.miso) self.spi.init() else: raise RuntimeError("Unsupported platform") self.rst.value(1) self.init() def _wreg(self, reg, val): self.cs.value(0) self.spi.write(b'%c' % int(0xff & ((reg << 1) & 0x7e))) self.spi.write(b'%c' % int(0xff & val)) self.cs.value(1) def _rreg(self, reg): self.cs.value(0) self.spi.write(b'%c' % int(0xff & (((reg << 1) & 0x7e) | 0x80))) val = self.spi.read(1) self.cs.value(1) return val[0] def _sflags(self, reg, mask): self._wreg(reg, self._rreg(reg) | mask) def _cflags(self, reg, mask): self._wreg(reg, self._rreg(reg) & (~mask)) def _tocard(self, cmd, send): recv = [] bits = irq_en = wait_irq = n = 0 stat = self.ERR if cmd == 0x0E: irq_en = 0x12 wait_irq = 0x10 elif cmd == 0x0C: irq_en = 0x77 wait_irq = 0x30 self._wreg(0x02, irq_en | 0x80) self._cflags(0x04, 0x80) self._sflags(0x0A, 0x80) self._wreg(0x01, 0x00) for c in send: self._wreg(0x09, c) self._wreg(0x01, cmd) if cmd == 0x0C: self._sflags(0x0D, 0x80) i = 2000 while True: n = self._rreg(0x04) i -= 1 if ~((i != 0) and ~(n & 0x01) and ~(n & wait_irq)): break self._cflags(0x0D, 0x80) if i: if (self._rreg(0x06) & 0x1B) == 0x00: stat = self.OK if n & irq_en & 0x01: stat = self.NOTAGERR elif cmd == 0x0C: n = self._rreg(0x0A) lbits = self._rreg(0x0C) & 0x07 if lbits != 0: bits = (n - 1) * 8 + lbits else: bits = n * 8 if n == 0: n = 1 elif n > 16: n = 16 for _ in range(n): recv.append(self._rreg(0x09)) else: stat = self.ERR return stat, recv, bits def _crc(self, data): self._cflags(0x05, 0x04) self._sflags(0x0A, 0x80) for c in data: self._wreg(0x09, c) self._wreg(0x01, 0x03) i = 0xFF while True: n = self._rreg(0x05) i -= 1 if not ((i != 0) and not (n & 0x04)): break return [self._rreg(0x22), self._rreg(0x21)] def init(self): self.reset() self._wreg(0x2A, 0x8D) self._wreg(0x2B, 0x3E) self._wreg(0x2D, 30) self._wreg(0x2C, 0) self._wreg(0x15, 0x40) self._wreg(0x11, 0x3D) self.antenna_on() def reset(self): self._wreg(0x01, 0x0F) def antenna_on(self, on=True): if on and ~(self._rreg(0x14) & 0x03): self._sflags(0x14, 0x03) else: self._cflags(0x14, 0x03) def request(self, mode): self._wreg(0x0D, 0x07) (stat, recv, bits) = self._tocard(0x0C, [mode]) if (stat != self.OK) | (bits != 0x10): stat = self.ERR return stat, bits def anticoll(self): ser_chk = 0 ser = [0x93, 0x20] self._wreg(0x0D, 0x00) (stat, recv, bits) = self._tocard(0x0C, ser) if stat == self.OK: if len(recv) == 5: for i in range(4): ser_chk = ser_chk ^ recv[i] if ser_chk != recv[4]: stat = self.ERR else: stat = self.ERR return stat, recv def select_tag(self, ser): buf = [0x93, 0x70] + ser[:5] buf += self._crc(buf) (stat, recv, bits) = self._tocard(0x0C, buf) return self.OK if (stat == self.OK) and (bits == 0x18) else self.ERR def auth(self, mode, addr, sect, ser): return self._tocard(0x0E, [mode, addr] + sect + ser[:4])[0] def stop_crypto1(self): self._cflags(0x08, 0x08) def read(self, addr): data = [0x30, addr] data += self._crc(data) (stat, recv, _) = self._tocard(0x0C, data) return recv if stat == self.OK else None def write(self, addr, data): buf = [0xA0, addr] buf += self._crc(buf) (stat, recv, bits) = self._tocard(0x0C, buf) if not (stat == self.OK) or not (bits == 4) or not ((recv[0] & 0x0F) == 0x0A): stat = self.ERR else: buf = [] for i in range(16): buf.append(data[i]) buf += self._crc(buf) (stat, recv, bits) = self._tocard(0x0C, buf) if not (stat == self.OK) or not (bits == 4) or not ((recv[0] & 0x0F) == 0x0A): stat = self.ERR return stat