本文旨在補充《超圖解Arduino互動設計入門》第十章。第10-31頁列舉兩種採用L298N的控制板,並採用第二種說明控制程式寫法,本文介紹第一種控制板的接線與程式範例。
10-31頁的第一種馬達控制板的控制接線比較多,但也是最原始的L298N電路的接線方式,因為這個板子的電路類似10-30頁的電路圖。如果您打算DIY或者在麵包板上組裝一個L298M控制板,請參考本文的控制程式。
基本的馬達控制電路接線如下:
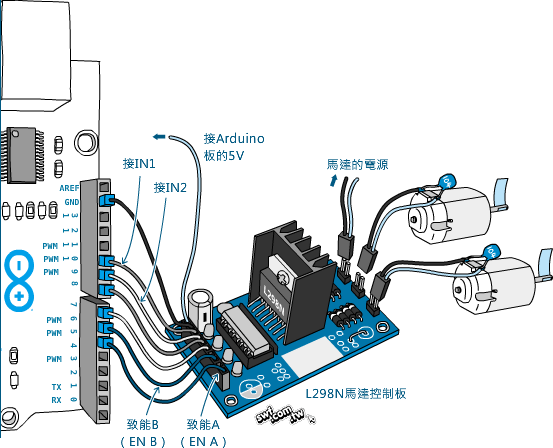
註1:馬達控制板的「致能A」和「致能B」腳,接Arduino的PWM腳位。
註2:為了避免接線圖凌亂,本文並未如10-30頁般,銜接Arduino的數位2和3腳。
註3:此控制板的IN1和IN2,等同10-30頁的「輸入1A」和「輸入2A」;IN3和IN4等同「輸入1B」和「輸入2B」。
從序列埠控制馬達轉向
實驗目標:讓Arduino接收來自「序列埠監控視窗」的w, a, s, d, x等字元,進而控制兩個馬達的轉向。
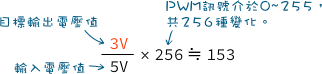
筆者採用的FA-130型馬達,其建議工作電壓為1.5V~3V。由於筆者的馬達電源輸入是5V,透過底下的算式可得知,PWM輸出值為153時,約等同輸出3V電壓給馬達(反之,從Arduino控制板的PWM輸出訊號值,請不要超過153):
實驗程式碼如下:
// 接收序列埠值的變數
char cmd;
// 設定啟動或停止馬達的參數
// 一開始先設定成「停止」
boolean run = false;
// 左馬達控制設定
const byte LEFT1 = 10;
const byte LEFT2 = 9;
const byte LEFT_PWM = 5;
// 右馬達控制設定
const byte RIGHT1 = 8;
const byte RIGHT2 = 7;
const byte RIGHT_PWM = 6;
// 設定PWM輸出值(註:FA-130馬達供電不要超過3v)
byte motorSpeed = 100;
void forward() { // 馬達轉向:前進
digitalWrite(LEFT1, HIGH);
digitalWrite(LEFT2, LOW);
digitalWrite(RIGHT1, HIGH);
digitalWrite(RIGHT2, LOW);
}
void backward() { // 馬達轉向:後退
digitalWrite(LEFT1, LOW);
digitalWrite(LEFT2, HIGH);
digitalWrite(RIGHT1, LOW);
digitalWrite(RIGHT2, HIGH);
}
void turnLeft() { // 馬達轉向:左轉
digitalWrite(LEFT1, LOW);
digitalWrite(LEFT2, HIGH);
digitalWrite(RIGHT1, HIGH);
digitalWrite(RIGHT2, LOW);
}
void turnRight() { // 馬達轉向:右轉
digitalWrite(LEFT1, HIGH);
digitalWrite(LEFT2, LOW);
digitalWrite(RIGHT1, LOW);
digitalWrite(RIGHT2, HIGH);
}
void setup() {
Serial.begin(9600);
pinMode(LEFT1, OUTPUT);
pinMode(LEFT2, OUTPUT);
pinMode(LEFT_PWM, OUTPUT);
pinMode(RIGHT1, OUTPUT);
pinMode(RIGHT2, OUTPUT);
pinMode(RIGHT_PWM, OUTPUT);
}
void loop() {
if (Serial.available() > 0) {
cmd = Serial.read();
switch (cmd) {
case 'w': // 接收到'w',前進。
forward();
run = true; // 啟動馬達
break;
case 'x': // 接收到'x',後退。
backward();
run = true; // 啟動馬達
break;
case 'a': // 接收到'a',左轉。
turnLeft();
run = true; // 啟動馬達
break;
case 'd': // 接收到'd',右轉。
turnRight();
run = true; // 啟動馬達
break;
case 's':
run = false; // 停止馬達
break;
}
}
if (run) {
// 如果要啟動馬達…
// 向馬達輸出指定的類比電壓值
analogWrite(LEFT_PWM, motorSpeed);
analogWrite(RIGHT_PWM, motorSpeed);
} else {
// 否則…
// 將馬達的電壓值設定成0
analogWrite(LEFT_PWM, 0);
analogWrite(RIGHT_PWM, 0);
}
}
英傑先生,
我今天針對「超圖解Arduino互動設計入門」,在給您的email中提了2個問題。
其中第2個問題是:「在14-18頁的圖中,L298N的GND直接接到Arduino板的GND上,那電池的負極接哪裡?」。
您的回答是:「GND接地,就是一般電源的「負極」」,這並沒有切中我的問題。
我的意思是:電池的正極是接到L298N的5V或12V)上,而負極本來是要接到 GND去的,但現在L298N的GND卻已經被用來跟arduino的GND連接了,那電池的負極要接哪裡?
hi frank:
電路中的接地都是相接在一起的,所以電池的負極可以接在Arduino控制板的任何一個GND接孔(註:UNO板子上面有3個GND插孔)。
thanks,
jeffrey
jeffrey,
「超圖解Arduino互動設計入門」ch14中:
1、我把電池線接到L298N的5V腳,紅色LED亮,遙控馬達,卻不動。
我把L298N的ENA及ENB的jumper都拆掉,再分別接到D6及D5,IN1接到D7,IN3接到D4,IN2及
IN4 空接,這樣對嗎?若馬達線接錯,應該只是轉動方向問題,應不至於不會動吧?
2、手機顯示<、>、x等方向符號,而switch case是用’w’、’x’、’a’、’d’、’s’,不會有問題吧?
Thanks
Frank
hi frank:
假設你的馬達控制板和上文相同,它的輸入∕輸出關係表,請參閱10-30頁上方的表10-5。馬達控制板的IN1, IN2控制馬達A的轉向;IN3和IN4則控制馬達B的轉向。
所以依照上文的程式:
ENA接D5,IN1, IN2接D9和D10。
ENB接D6,IN3, IN4接D7和D8。
至於手機顯示<、>、x等方向符號,只是操作介面的外觀;使用者按下這些按鈕時,實際送出的值就是’w’、’x’、’a’、’d’、’s’。相關說明請參閱附錄E,或者「Windows版App Inventor 2.0離線版軟體(Ai2LiveComplete)安裝說明與基礎操作」文末的「App Inventor 2.0版附錄E與範例檔下載」單元。
thanks,
jeffrey
jeffrey,
我的L298N模組與書本不一樣,但已經參照元智大學網路文章的安裝方式,成功。另外,我買的藍牙模組之PIN腳功能也與書本所標示的不一樣,但也已經安裝成功。而程式stop部分得要多加2行,才能正常運作,見下面備註「Added by me」那2行。
void stop() { // 馬達停止
analogWrite(EA, 0); // 馬達 A 的 PWM 輸出
digitalWrite(IA, LOW); // Added by me
analogWrite(EB, 0); // 馬達 B 的 PWM 輸出
digitalWrite(IB, LOW); // Added by me
}
Thanks
Frank
感謝告知!
thanks,
jeffrey
我供電的地方我用電表量是13V,在還沒接馬達前兩側馬達輸出電壓為3V,但是一街上馬達之後輸出電壓剩0.6V 左右 導致馬達轉不動, 我一直找不出原因可以幫我解答嗎?
hi michael:
L298N的技術文件第3頁有記載此IC在驅動馬達時,會有1.8V/1A~4.9V/2A的電壓降(total drop),所以驅動3V的小型馬達,控制板的馬達電源接5V就夠了。你電源接13V,再接上負載之後電壓降到0.6V…我覺得應該是控制板的IC或二極體故障了。
thanks,
jeffrey
老師您好
我是本書的門外漢讀者 我按照此網頁的接法 並將l298n接9V電池 另將l298n的5v接到arduino的5v 小車能走 但常發出嗶嗶聲 而且馬達好像不太順 容易卡住 請教是甚麼原因? 這是l298n發出的聲音嗎? 需要給arduino另外接電源嗎?
謝謝
hi tammy:
一般小車的馬達應該是採用3V小馬達,我覺得問題是出在馬達的電流不足,請改接5V測試——我現在大都改用手機的行動電源,方便實用。
thanks,
jeffrey
老師我想請問一下,我最近買了兩個L298N驅動模組(對岸出場的),他有四個上拉電阻選擇腳跟兩個AB項致能控制還有2個CSA/B通道電流檢測腳。
我想問如果要控制馬達轉速是要從致能控制腳輸入PWM訊號嗎?
還有上拉電阻的功用到底為何?我查了好多資料都沒說明清楚。
CSA/B檢測腳要怎麼使用?
感謝老師抽空幫忙。
hi oakmilk:
是的,可從EN腳輸入PWM訊號控制轉速。
如同10-29頁說明,L298N的1和15腳用於偵測馬達的堵轉電流。多數的L298N馬達控制模組都沒有使用這項功能,ST晶片廠商的L298系列技術文件,第7頁也有說明,若需要偵測堵轉電流,可在這兩個腳位連接低歐姆數的電阻,第8頁的示範電路連接的是0.5Ω的電阻。
技術文件第3頁的電子特性表(ELECTRICAL CHARACTERISTICS)有提到這兩個接腳的Vsense電壓,最大值為2V。假設它們輸出2V,依照歐姆定律,流經0.5Ω的電流將高達4A!也就是這兩個電阻各自要承受8W的熱量!
如果真要連接這兩個電阻,你可以從預設的堵轉電流反推,假設堵轉電流是2A,電阻值設定為0.5Ω,消耗熱量就是2W,建議至少採用3W, 0.5Ω電阻。
thanks,
jeffrey
老師您好:本人依照此書上的教學學習自製避障自走車,按照範例上的線路接法與程式碼上傳,供應電源後馬達卻沒有反應(馬達是用外接電源12v Arduino板用9v) 有試過直接給馬達供電可正常運轉,題,但是接上去L298N馬達控制模組後可看到馬達控制面板上接角的LED發光但馬達卻不會動,請老師幫個忙~ 謝謝!
hi hank:
請先單獨測試L298N控制板和馬達,參閱10-30頁的表10-5,先把輸入1A(in1)、輸入1B(in2)分別接5V和接地,致能A(EN A)接5V,再接上馬達、馬達電源和控制板的5V電源,馬達應該會轉動。如果馬達不轉,代表L298N控制板可能故障了。
thanks,
jeffrey
你好,我用以下程式去控制小車的直流減速馬達
在前進時有時候兩顆同時跑不動(會發出很像蜂鳴的聲音)、有時候兩顆有點像同時跑但是很卡且時間點對不上
不知道是哪裡出了問題,如有空煩請解答謝謝。
// 右輪馬達-A
const byte IN1 = 5; // 馬達A 的正反轉接腳編號
const byte IN2 = 6;
const byte ENA = 3; // 馬達A 的 PWM 轉速控制
// 左輪馬達-B
const byte IN3 = 9; // 馬達B 的正反轉接腳編號
const byte IN4 = 10;
const byte ENB = 11; // 馬達B 的 PWM 轉速控制
int speed; // 定義速度變數,PWM 輸出範圍為 0~255
void setup() {
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENB, OUTPUT);
speed = 100; //初始化速度
}
void forward()
{
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
}
void backward()
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
}
void turnLeft()
{
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}
void turnRight()
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
}
void stop()
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}
void loop() {
analogWrite(ENA, speed); //輸出 PWM 脈衝到 ENA
analogWrite(ENB, speed); //輸出 PWM 脈衝到 ENB
forward(); // 前進
delay(1000); // 延時5秒
backward(); // 後退
delay(1000); // 延時5秒
turnLeft(); // 左轉
delay(1000); // 延時5秒
turnRight(); // 右轉
delay(1000); // 延時5秒
stop();
delay(600); // 延時6秒
speed += 40; // 加速
if (speed >= 240) { // 速度超過 240 則回到預設值(100)
speed = 100;
}
}
馬達會卡的話,應該是電流不足,請嘗試加大speed值。
thanks,
jeffrey
我把ENA和ENB的跳線帽拆除,分別會露出兩個pin腳,請問我是用ENA其中一個pin腳跟ENB其中一個pin腳來連接PWM的pin腳即可嗎?
EN腳用跳線帽連接的另一腳是5V,你可以觀察印刷電路板上的銅箔走線,ENA和ENB的跳線相鄰腳之間,應該有銅箔相連,或者,你可以用三用電錶的電阻檔位檢測,跳線帽連接的其中一腳與5V相連。
通常有印字的那一腳就是ENA或ENB接腳,另一腳是5V,不要連錯了。
thanks,
jeffrey
老師您好:
想要詢問老師您
如果想要透過一個按鍵更改 馬達的轉速
應該怎麼做呢?
例如
手機按下A鍵 馬達轉速就會提高
手機按下B鍵 馬達轉速就會降低
感謝
謝謝
hi hackerC:
首先,你要知道如何控制馬達的轉速;
然後,要知道如何開發手機APP,
光是開發APP的工具和程式語言就有好多種。
你先解決第一個問題,再處理下個問題。
thanks,
jeffrey
關於馬達並聯電容的用意
請問是因為步進馬達內部線圈之電感在迴路中產生感抗(+90度相位)
使用電容之容抗(-90度相位)藉此抵銷虛功率
也就是LC電路互相充放? 否則線圈會在L298N的PIN腳上輸入突波
這樣講對嗎?
我不確定你說得對不對,不過,並聯在直流馬達上的電容和IC電源腳的旁路電容一樣,都是用來吸收電源或訊號之外的突波雜訊,就這樣。
thanks,
jeffrey
了解,謝謝老師回覆
你好~
我用陀螺儀控制傾斜到一定角度時馬達起動正常,輸出電壓也與輸入電壓相同,但再加上超音波感測器偵測距離使馬達停止,使用電表量測L298 OUT輸出,輸出電壓小於輸入給馬達的12V指有1V左右(PWM已設定225),這是什麼原因?
超音波感測器並不是直接與L298N相連,所以這兩者沒有關聯,問題應該是出在程式邏輯。
thanks,
jeffrey
程式碼是這樣,也試過不同寫法的超音波感測器,使用電表量測馬達輸出都有電壓,指是都在1V以內而已,會使有接腳衝突嗎(使用UNO版)?
#include
#include
#include
#define Echo 13
#define Trig 12
long duracion, distancia;
MPU6050 mpu;
int16_t ax, ay, az;
int16_t gx, gy, gz;
void setup()
{
Wire.begin();
Serial.begin(9600);
Serial.println(“Initialize MPU”);
mpu.initialize();
Serial.println(mpu.testConnection() ? “Connected” : “Connection failed”);
pinMode(Echo, INPUT);
pinMode(Trig, OUTPUT);
pinMode(7,OUTPUT); //IN3
pinMode(8,OUTPUT); //IN4
pinMode(9,OUTPUT); //ENB
pinMode(4,OUTPUT); //IN1
pinMode(5,OUTPUT); //IN2
pinMode(6,OUTPUT); //ENA
}
void loop()
{
mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
ax = map(ax, -17000, 17000, -125, 125);
digitalWrite(Trig, LOW);
delayMicroseconds(2);
digitalWrite(Trig, HIGH);
delayMicroseconds(10);
digitalWrite(Trig, LOW);
duracion = pulseIn(Echo, HIGH);
distancia = (duracion/2) / 29;
if(ax > 0 &&distancia >= 100 && distancia >= 1){
Serial.println(ax);
if(ax>80){
Serial.println(ax);
// 馬達轉向:前進(兩個馬達都正轉)
digitalWrite(8,HIGH);
digitalWrite(7,LOW);
analogWrite(9,255);
digitalWrite(5,HIGH);
digitalWrite(4,LOW);
analogWrite(6,255);
if (distancia = 1){
analogWrite(9,0);
Serial.println(“Danger……”) ;}
else{
Serial.println(ax);
analogWrite(6,0);
analogWrite(9,0);
}
}
}
}
看來是條件運算式有誤:
(ax > 0 && distancia >= 100 && distancia >= 1)
改成:
(ax > 0 && distancia <= 100 && distancia >= 1)
thanks,
jeffrey
你好!我用的是L298N控制9V的直流馬達,但是馬達沒有轉動
const int motorIn1=5;
const int motorIn2=6;
void setup()
{
pinMode(motorIn1, OUTPUT);
pinMode(motorIn2, OUTPUT);
}
void loop()
{
for(int i=150; i<256; i+=10)
{
analogWrite(motorIn1, i);\\正轉加速
analogWrite(motorIn2, 0);
delay(150);
}
analogWrite(motorIn1, 0);
analogWrite(motorIn2, 0);
delay(2000);
}
請先用簡單的程式確定是否能轉動,改自你的程式碼:
const int motorIn1=5; const int motorIn2=6; void setup() { pinMode(motorIn1, OUTPUT); pinMode(motorIn2, OUTPUT); analogWrite(motorIn1, 128); } void loop(){ }你還要確認控制板的形式,照理說你應該還要接上1A, 1B之類的腳位(請參閱10-29頁的表格)。
thanks,
jeffrey
不好意思老師,我想我找到問題了,程式的部分我相信大致上沒有問題,問題出在馬達輸出的電壓,用電表量了一下,當供電為9V時(這是馬達需求電壓),量出的電壓不足1V,後來我換成12V,馬達就轉動了,所以我想請問這是正常的現象嗎嗎?!會不會是IC本身的問題??
我認為IC沒有問題,應該是馬達電源的電流不足以驅動它。
thanks,
jeffrey
老師你好
最近遇到一個問題 當L298N接6V輸入的時候馬達輸出有3V,但輸入電壓6V改成12V時,會沒有輸出
請問這是甚麼問題?
還有就是L298N能提高馬達輸出電壓,或是不要讓輸出壓降這麼高
有甚麼辦法可以解決?
1. 我覺得是馬達的電源端子接錯了,L298N IC本體的電源和馬達的電源是分開的,如10-28頁所示。
2. L298N無法提高馬達的電壓輸出,假設馬達的電源是12V,它最高就只能供給12V,但是你可以透過PWM調控馬達的電力,讓它介於0V~馬達電壓(如:12V)之間,如10-34頁程式裡的speed變數。
thanks,
jeffrey
赵老师您好
我有个问题向您请教,我用了您的例子代码通过串口监视器,进行控制电机运转正常,没有问题。可是随后,用我的蓝牙HC-06模块,已设置成从机模式(把串口的设置都改成了蓝牙接收的设置)和我的安卓手机(锤子手机 Android 5.1.1版本),利用App inventor 2进行交互界面控制却完全没有反应(以排除以下问题的可能1、手机蓝牙已经搜索到,配对成功。2、l298n的电机输出口,用万用表测量没有电压)下面是程序,请你指教!感谢!:)
#include // 引用「軟體序列埠」程式庫
SoftwareSerial BT(3, 2); // 設定軟體序列埠(接收腳, 傳送腳)
char command;
// 接收序列埠值的變數
//char cmd;
// 設定啟動或停止馬達的參數
// 一開始先設定成「停止」
boolean run = false;
// 左馬達控制設定
const byte LEFT1 = 10;
const byte LEFT2 = 9;
const byte LEFT_PWM = 5;
// 右馬達控制設定
const byte RIGHT1 = 8;
const byte RIGHT2 = 7;
const byte RIGHT_PWM = 6;
// 設定PWM輸出值(註:FA-130馬達供電不要超過3v)
byte motorSpeed = 255;
void forward() { // 馬達轉向:前進
digitalWrite(LEFT1, HIGH);
digitalWrite(LEFT2, LOW);
digitalWrite(RIGHT1, HIGH);
digitalWrite(RIGHT2, LOW);
}
void backward() { // 馬達轉向:後退
digitalWrite(LEFT1, LOW);
digitalWrite(LEFT2, HIGH);
digitalWrite(RIGHT1, LOW);
digitalWrite(RIGHT2, HIGH);
}
void turnLeft() { // 馬達轉向:左轉
digitalWrite(LEFT1, LOW);
digitalWrite(LEFT2, HIGH);
digitalWrite(RIGHT1, HIGH);
digitalWrite(RIGHT2, LOW);
}
void turnRight() { // 馬達轉向:右轉
digitalWrite(LEFT1, HIGH);
digitalWrite(LEFT2, LOW);
digitalWrite(RIGHT1, LOW);
digitalWrite(RIGHT2, HIGH);
}
void setup() {
//Serial.begin(9600);
BT.begin(9600); // 啟動軟體序列埠
pinMode(LEFT1, OUTPUT);
pinMode(LEFT2, OUTPUT);
pinMode(LEFT_PWM, OUTPUT);
pinMode(RIGHT1, OUTPUT);
pinMode(RIGHT2, OUTPUT);
pinMode(RIGHT_PWM, OUTPUT);
}
void loop() {
// if (Serial.available() > 0) {
// cmd = Serial.read();
if (BT.available() > 0) {
command = BT.read();
// switch (cmd) {
switch (command) {
case ‘w’: // 接收到’w’,前進。
forward();
run = true; // 啟動馬達
break;
case ‘x’: // 接收到’x’,後退。
backward();
run = true; // 啟動馬達
break;
case ‘a’: // 接收到’a’,左轉。
turnLeft();
run = true; // 啟動馬達
break;
case ‘d’: // 接收到’d’,右轉。
turnRight();
run = true; // 啟動馬達
break;
case ‘s’:
run = false; // 停止馬達
break;
}
}
if (run) {
// 如果要啟動馬達…
// 向馬達輸出指定的類比電壓值
analogWrite(LEFT_PWM, motorSpeed);
analogWrite(RIGHT_PWM, motorSpeed);
} else {
// 否則…
// 將馬達的電壓值設定成0
analogWrite(LEFT_PWM, 0);
analogWrite(RIGHT_PWM, 0);
}
}
「代码通过串口监视器,进行控制电机运转正常。」也就代表Arduino的代码没有问题,请在Android手机安装 “Bluetooth Serial” 软件,通过它发送字符测试看看。
thanks,
jeffrey
感谢您的回复,我下面试一下。另外还有个问题:您第三版光盘里的离线的《app inventor offline》应该如何安装呢?求指教谢谢:)
请参阅「Windows版App Inventor 2.0離線版軟體(Ai2LiveComplete)安裝說明與基礎操作」。
thanks,
jeffrey
你好 我的馬達並不會轉 只會一直發出聲音 一直找不出問題點
const int motorIn1=11; //左輪馬達前進
const int motorIn2=10; //左輪馬達後退
const int motorIn3=5; //右輪馬達前進
const int motorIn4=6; //右輪馬達後退
const int SLeftLeft = 7; //中間 左感測器輸入腳
const int SRightRight = 8; //中間 右感測器輸入腳
const int SL = 9; //外側 左感測器輸入腳
const int SR = 3; //外側 右感測器輸入腳
const int LS = 12; //光感測器
int LL,RR,LA,RA,LON;
int spdL,spdR,spd_low,spd_bk,spd_tn;
int RUN=1,DONE=0,CNT=0;;
void setup() {
pinMode(motorIn1,OUTPUT);
pinMode(motorIn2,OUTPUT);
pinMode(motorIn3,OUTPUT);
pinMode(motorIn4,OUTPUT);
pinMode( SLeftLeft,INPUT);
pinMode( SL,INPUT);
pinMode( SRightRight,INPUT);
pinMode( SR,INPUT);
pinMode( LS,INPUT);
spdL=70;
spdR=80;
spd_low=40;
spd_bk=50;
spd_tn=80;
}
void CarStop()
{
analogWrite(motorIn1,0);
analogWrite(motorIn3,0);
analogWrite(motorIn2,0);
analogWrite(motorIn4,0);
}
void CarCTRL()
{
if ((LA == 0) && (LL == 1) && (RR == 1) && (RA == 0))
{
analogWrite(motorIn1,spdL);
analogWrite(motorIn3,spdR);
analogWrite(motorIn2,LOW);
analogWrite(motorIn4,LOW);
}
if ((LA == 0) && (LL == 1) && (RR == 0) && (RA == 0))
{
analogWrite(motorIn1,spd_low);
analogWrite(motorIn3,spdR);
analogWrite(motorIn2,LOW);
analogWrite(motorIn4,LOW);
}
else if ((LA == 0) && (LL == 0) && (RR == 1) && (RA == 1))
{
analogWrite(motorIn1,spdL);
analogWrite(motorIn3,spd_low);
analogWrite(motorIn2,LOW);
analogWrite(motorIn4,LOW);
}
else if ((LA == 0) && (LL == 0) && (RR == 0) && (RA == 1))
{
analogWrite(motorIn1,spd_tn-30);
analogWrite(motorIn3,0);
analogWrite(motorIn2,LOW);
analogWrite(motorIn4,LOW);
}
else if ((LA == 1) && (LL == 1) && (RR == 0) && (RA == 0))
{
analogWrite(motorIn1,spd_low);
analogWrite(motorIn3,spdR);
analogWrite(motorIn2,LOW);
analogWrite(motorIn4,LOW);
}
else if ((LA == 1) && (LL == 0) && (RR == 0) && (RA == 0))
{
analogWrite(motorIn1,0);
analogWrite(motorIn3,spd_tn);
analogWrite(motorIn2,LOW);
analogWrite(motorIn4,LOW);
}
else if ((LA == 0) && (LL == 0) && (RR == 1) && (RA == 0))
{
analogWrite(motorIn1,spdL);
analogWrite(motorIn3,spd_low);
analogWrite(motorIn2,LOW);
analogWrite(motorIn4,LOW);
}
else if ((LA == 0) && (LL == 0) && (RR == 0) && (RA == 0))
{
analogWrite(motorIn2,spd_bk);
analogWrite(motorIn4,spd_bk+10);
analogWrite(motorIn1,LOW);
analogWrite(motorIn3,LOW);
}
else
{
analogWrite(motorIn1,spd_low);
analogWrite(motorIn3,spd_low);
analogWrite(motorIn2,LOW);
analogWrite(motorIn4,LOW);
}
// 計算停止後之行駛時間
if (DONE == 1)
{
CNT++;
if (CNT > 30000)
{
DONE=0;
CNT=0;
}
}
}
void loop()
{
LL=digitalRead(SLeftLeft);
RR=digitalRead(SRightRight);
LA=digitalRead(SL);
RA=digitalRead(SR);
LON=digitalRead(LS);
if ((LON == 0) && (DONE == 0))
{
CarStop();
delay(1000);
DONE=1;
}
else CarCTRL();
}
建議先用簡單的轉動程式測試,也許是馬達供應電流不足所導致。
thanks,
jeffrey
老師您好!
有個問題想請教您。如何讓馬達電壓與PWM值成正比例關係?
我想用的Arduino精確控制馬達輸出電壓的大小,採用12.6V的鋰電池給L298N供電,在PWM輸出255,127,63(即佔空比為100%,50%,25%)的情況下,OUT1, OUT2之間(不接馬達)的電壓分別為12.6V,6.2V,3.1V,完全符合PWM值與輸出電壓成正比例的關係。
然而,一旦OUT1,OUT2之間接上馬達,馬達電壓與PWM值呈現非線性關係:在PWM = 255時,電壓為10.32(低於理論值2V); PWM = 127時,電壓為7.6 V(這次卻高於理論值1.5V); PWM = 63時,電壓為3.7V。
第二次實驗,我用另一組8V的鋰電池,新購的L298N,不同型號的馬達做了同樣的實驗,得出一樣的結果。一旦OUT1,OUT2之間接上馬達,電壓發生變化,與PWM值呈現非線性關係。
第三次實驗,我用兩種鋰電池直接連接馬達,實測馬達電壓和電源電壓一致。
第四次實驗,L298N接4歐姆(和馬達的內阻相同)的電阻,奇怪的是接上電阻後,電壓竟然也與pwm值呈現非線性關係。
結論,經過四次實驗發現,無法用PWM值控制想要的電壓。雖然L298N的空載輸出電壓與PWM值成正比例;但是一旦接上負載,不管是馬達還是電阻,電壓與PWM值呈現誇張的非線性關係。
請問,如何用PWM值控制馬達電壓的大小?
因為輸出電路在沒有連接負載的情況下,不會受到其他元件的影響,所以輸出訊號和預期相同(線性變化)。
馬達內部包含線圈,接上馬達時,控制器的輸出端相當於連接一個由電阻和電感構成的濾波器,進而影響輸出訊號(電感類似電容,會儲存電能);馬達透過線圈通電所產生的磁場來驅動轉子旋轉,一開始會消耗較多的電流才能驅動。
每一種馬達的物理特性都不同,再加上馬達驅動的裝置也不一樣(如:不同重量的自走車,或不同樣式的扇葉),我們很難從輸出的PWM訊號來預測轉速,唯一的方法是加裝「轉速計」,像遮光型光電開關或霍爾感測器,再從轉速感應器的回傳(回授)訊號來調整PWM輸出。
thanks,
jeffrey
想請問該如何解決兩個馬達輸出不平衡的問題?
設定直線時總是會偏掉
額…正好是Arduino新書的其中一個單元內容,需要搭配編碼器取得馬達轉速,才能用程式協調讓兩輪的速度趨近一致。
老師您好!
最近在使用L298N遇到一個問題,我輸入電壓是18V,分別使用6V馬達,12V馬達,然後使用PWM來降電壓,6V馬達部份沒問題,使用PWM可以降到6V左右,12V馬達,PWM = 35 時,電壓還有13.6V,然後電流只剩下0.24A,當PWM = 140時 ,電壓有17.5V,電流有13.9A,照理說PWM應該會比例降壓才對? 另外如果我要降低到12V左右符合馬達電壓,電流只有0.24A,又小的可憐根本推不動馬達,我實在找不出那裡出錯了,求指教,謝謝
剛才用L298N模組,接390馬達,12V/2A電源:
用底下的程式測試:
int16_t pwm = 0; // 馬達的 PWM 輸出值 const uint8_t ENA = 10; // 馬達的致能接腳 const uint8_t IN1 = 8; const uint8_t IN2 = 9; void stop() { // 馬達停止 analogWrite(ENA, 0); } void forward() { analogWrite(ENA, pwm); digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW); } void setup() { Serial.begin(115200); Serial.println("motor tester"); pinMode(IN1, OUTPUT); pinMode(IN2, OUTPUT); } void loop() { if (Serial.available()) { String txt; int val; txt = Serial.readStringUntil('\n'); val = txt.toInt(); pwm = abs(val); if (pwm > 255) pwm = 255; Serial.print("PWM: "); Serial.println(pwm); } forward(); delay(50); }測試運作正常。
我拆下馬達測量不同PWM值的輸出電壓:
PWM 120: 10.46V
PWM 80: 9.35V
PWM 50: 8.37V
PWM 30: 7.63V
請檢查你的12V馬達電源接地,是否有和開發板的接地相連。