樂高積木是解決機械構件和動力傳動系統的好幫手,而且幾乎所有品牌的積木玩具都和樂高相容。
幾個月前在文具行購買了對岸的積木公司的履帶工程車,不像BANDAI, MEGA BLOKS, KRE-O和OXFORD等大廠牌的積木,這積木的品質參差不齊,有些很緊密,接合之後很難拔開;有些則太鬆,某些零件還有毛邊或小尖刺,更糟糕的是,我購買兩盒當中的一盒有濃厚的塑膠味。
這種積木最大的賣點就是便宜,很適合拿來改造、削切、黏合,即便不小心搞壞了,也比較不會心疼。
我只需要工程車裡面的履帶來製作移動平台,本文的零件混合使用了樂高和其他品牌的積木。
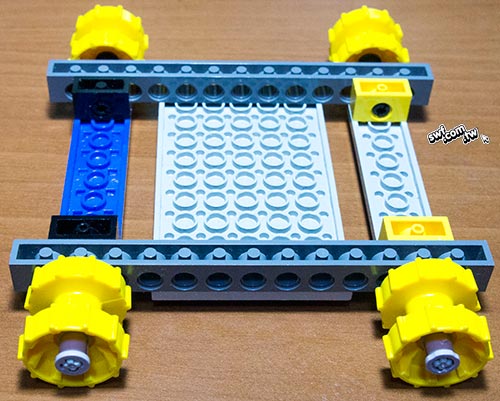
這是底盤背面和輪胎:
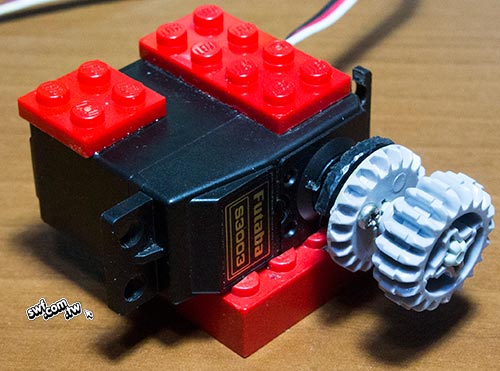
在改造成360度旋轉的伺服馬達(參閱《超圖解Arduino互動設計入門》的「11-3改造伺服馬達成連續360°旋轉」單元)兩側,黏貼樂高積木,並且在擺臂鑽孔、用螺絲釘鎖上履帶的驅動齒輪零件。這些螺絲釘是從桌上型電腦的舊光碟機拆下來的,其實最好能鑽3, 4個螺絲孔,比較穩固。
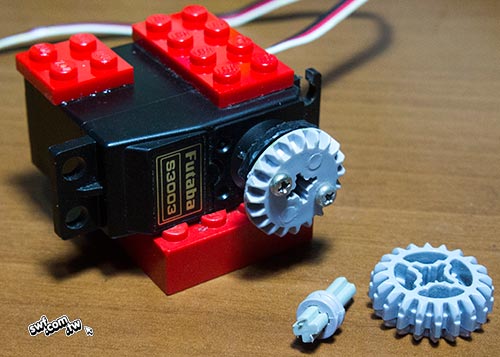
套上外側齒輪的模樣:
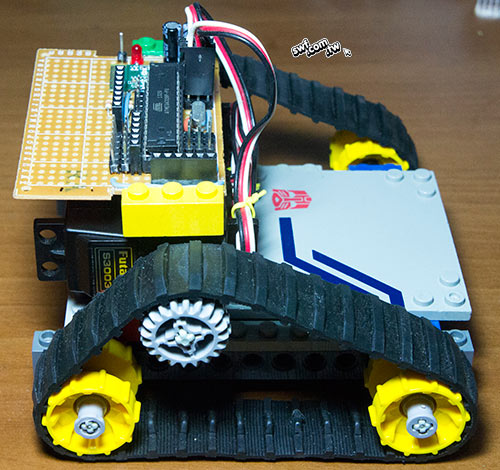
把兩個伺服馬達組合在底盤上:
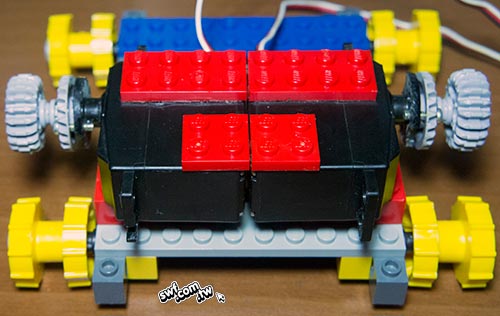
伺服馬達上面用兩片積木(照片裡的藍色積木),將它們固定在一起:
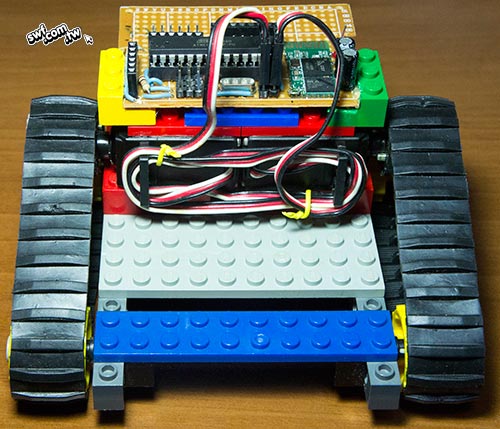
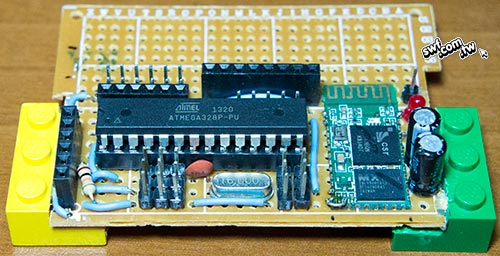
搭配自製的Arduino控制板
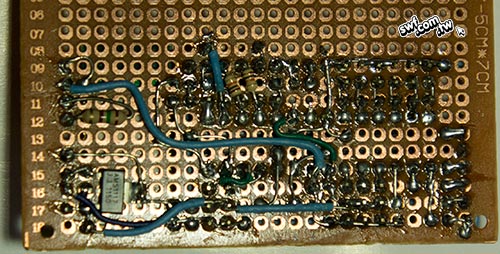
我在萬用PCB板上引出需要用到的ATmega328微控器腳位,並且焊接一個HC-05型的藍牙模組。為了節省電路板的空間,我將連接石英震盪器的兩個22pF電容,塞在IC腳座的中間:
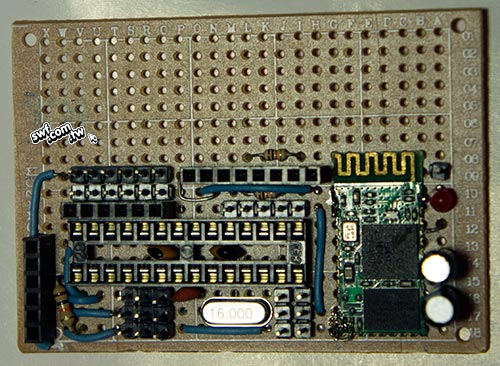
PCB板背面焊接藍牙模組所需要的3.3V直流電壓轉換電路(採用AMS1117,電路圖請參閱「使用Sony PlayStation 2控制器操控Arduino微電腦(5/2更新:3.3V直流電壓轉換電路)」這篇貼文)。
裁切兩個積木黏貼在電路板的兩側:
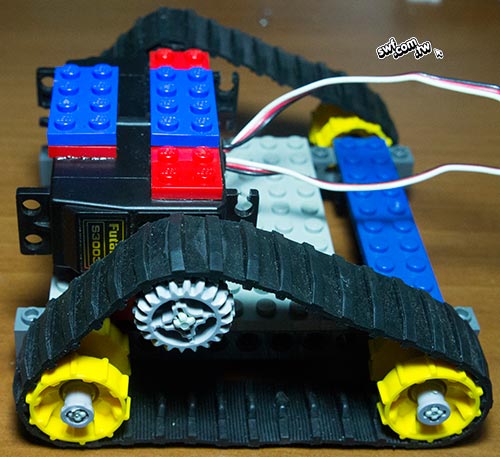
整理好伺服馬達的控制接線,接上自製的Arduino控制板。馬達的前、後空間,保留給電池盒和其他感應器模組使用: