作者:趙英傑
出版社:旗標科技股份有限公司
出版日期:2018.5.1
頁數:640頁,雙色印刷(4頁全彩)。
定價:NT$699
- 用最夯的Python語言學習程式設計
- 用最超值的ESP8266控制板學物聯網
- 用最易懂的超圖解學電子電路
- 人人都能化身創客自造各種智慧應用
這是一本結合Python語言、電子電路、微電腦控制和物聯網的圖解入門書。
本書的電子零件清單與配套的材料包,請參閱這一篇貼文。
Python無疑是近年最受注目的通用型程式語言,它的語法簡單易學,不僅智慧型手機、個人電腦到網路雲端應用平台都支援Python程式,應用領域更遍及系統工具、網路程式、數值分析到人工智慧,而開放原始碼的MicroPython專案,則可在拇指大小的微電腦控制器上執行Python程式,讓你直接用Python控制硬體或開發物聯網專案,就連歐洲太空總署也將MicroPython應用在控制太空載具(詳見MicroPyhon官網論壇的“MicroPython and the European Space Agency”貼文)。
MicroPython支援多種32位元控制板,本書採用的是內建Wi-Fi無線網路、價格低廉的ESP8266系列控制板。
打好基礎,超圖解電子電路觀念
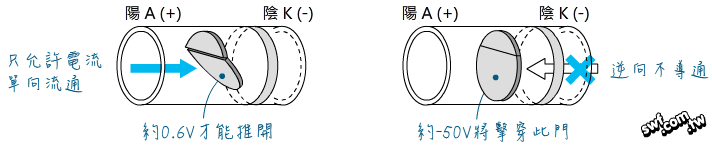
本書的目標是讓沒有電子電路基礎,對微電腦、電子DIY 及物聯網有興趣的人士,也能輕鬆閱讀、認識Python語言,進而順利使用Python與ESP8266控制板完成互動應用。因此,實驗用到的電子、電路組裝和Python程式觀念,皆以手繪圖解的方式說明。例如,底下是二級體元件的概念圖解:
為了方便讀者進行實驗,書本裡的電路都採用現成的模組,並搭配圖解說明,讓讀者不單只會照著接線,也能理解電子模組背後的原理,進而能靈活改造應用並實踐自己的想法。

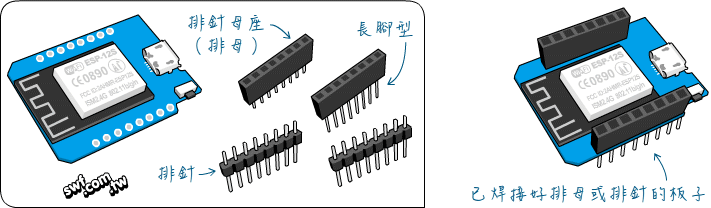
WEMOS D1 mini (ESP8266) 控制板
ESP8266系列控制板種類很多,本書選用的是WEMOS D1 mini板:
採用D1 mini板的主要原因:
- 尺寸小、可插入麵包板。
- 有5V輸出和輸入,方便驅動各種週邊和感測器。
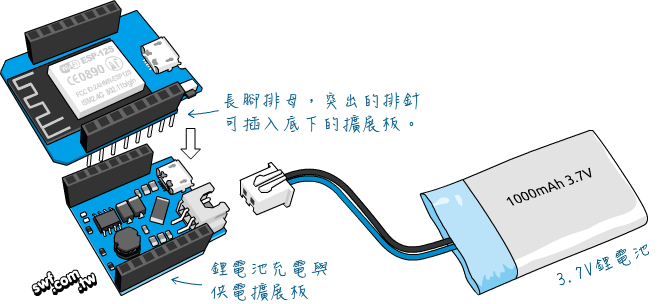
- 有多種現成的「擴展板」模組可用,而且擴展板的接腳採用標準2.54mm孔距的排母或排針,不像某些廠商採用特殊規格的插座。
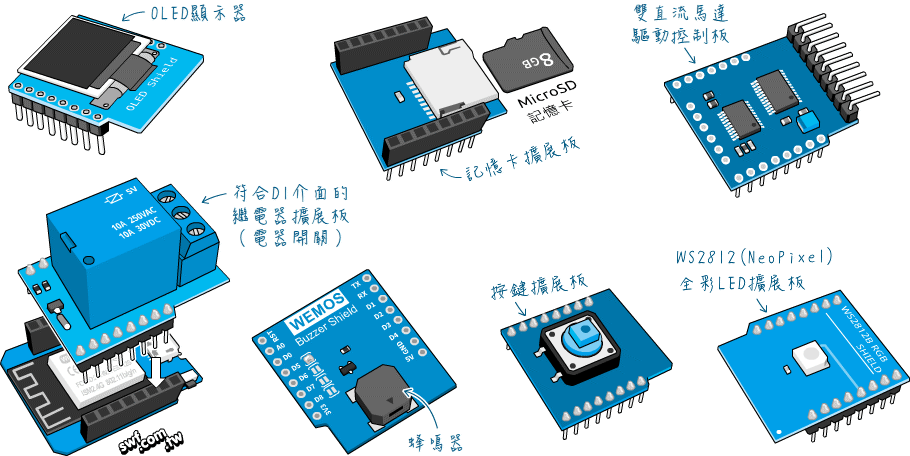
擴展板雖然方便,但也有些缺點,像是配線彈性不足,有些擴展板佔用相同的微控器接腳,無法一同使用,有些則受限於擴展板的尺寸,像OLED顯示器和NeoPixel全彩LED,就採用解析度較低或者數量較少的元件,所以本書未全盤採用這些擴展板。
超圖解Python程式設計入門
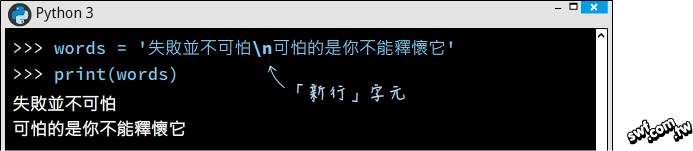
為了清楚說明程式語法和執行結果,書本裡面的命令提示字元(終端機)視窗,也全都用手繪方式呈現:
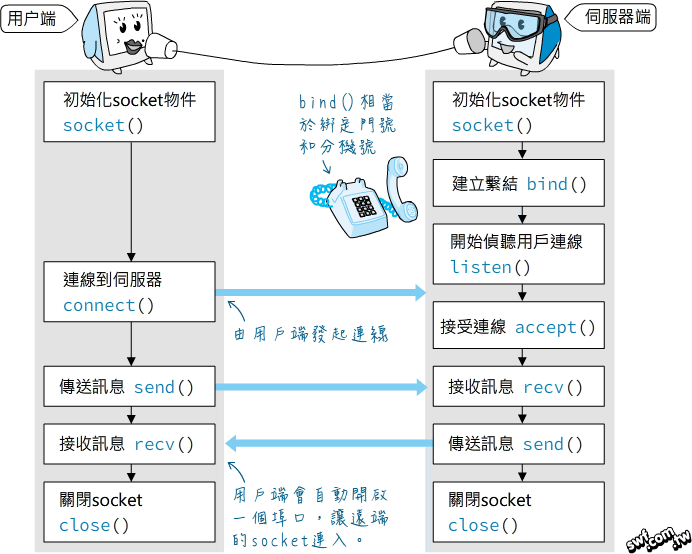
底下是用Python語言建立網路用戶端和伺服器程式的流程和相關指令對照說明:
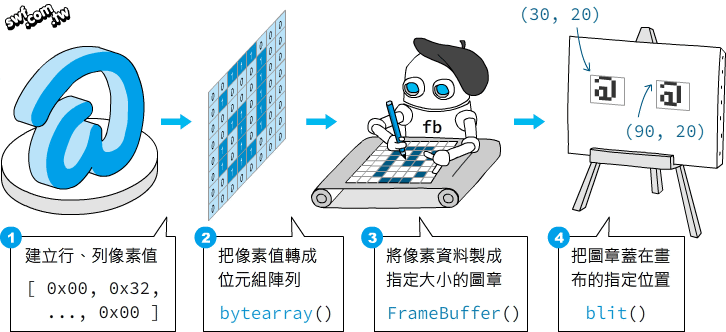
底下是在OLED螢幕呈現自訂符號的步驟和相關指令對照說明:
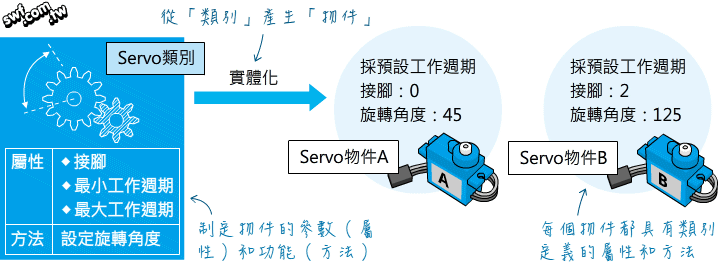
本書也有說明實用的物件導向程式設計(OOP)手法,自行編寫伺服馬達(Servo)、超音波距離感測器、直流馬達控制板…等程式庫。
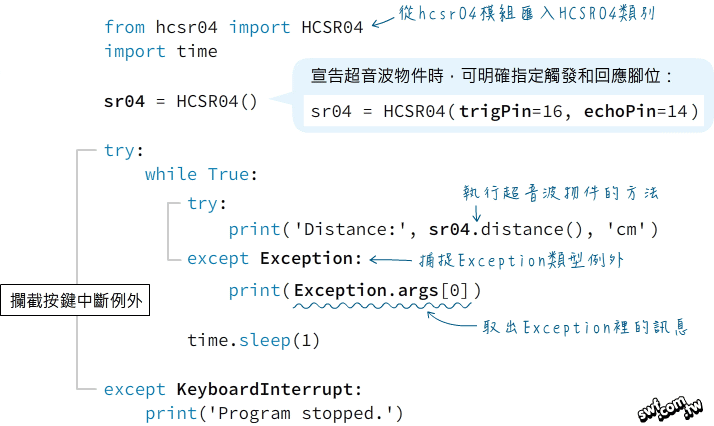
這是用自製的超音波距離感測器程式庫,達成測量物體距離的Python程式解說:
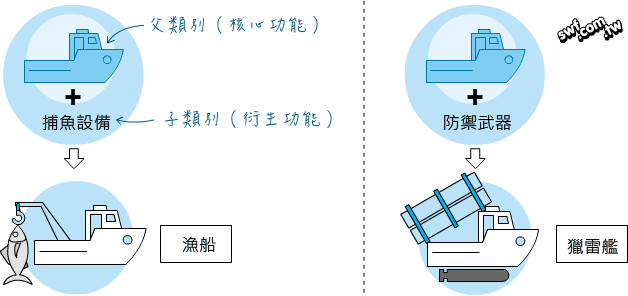
書中也以範例實作說明物件導向程式設計中的「繼承」概念(註:實作內容與伺服馬達有關,不是拼裝獵雷鑑)。
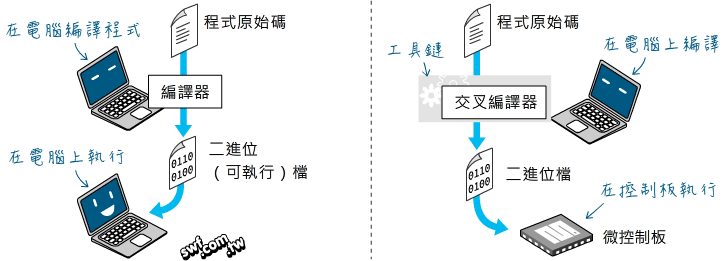
最後的「附錄B」則說明如何運用Windows 10的WSL(適用於Linux的Windows子系統),安裝Debian Linux並且配置交叉編譯器(cross-compiler),讓讀者了解如何自行編譯客製化的MicroPython韌體。
《超圖解Python物聯網實作入門:使用ESP8266, MicroPython》目錄
第1章 認識MicroPython與ESP8266控制板
- 認識MicroPython、pyboard和ESP8266控制板
- 認識程式語言
- 在個人電腦上安裝Python 3.x版本
- WEMOS D1 mini和NodeMCU控制板簡介
- 下載與燒錄MicroPython韌體
- 透過終端機操控MicroPython控制板
- MicroPython和Arduino的程式開發流程比較
- 動手做 1-1 用Python控制LED閃爍
第2章 認識電子零件與工具
- 電壓、電流與接地
- 電阻
- 電容
- 二極體
- 發光二極體(LED)
- 看懂電路圖
- 微控制板和實驗電路的電源供應器
- 電子工作必備的量測工具:萬用電錶
- 動手做2-1 測量電阻或電容
- 麵包板以及其他電子工具
第3章 MicroPython基本操作
- MicroPython程式設計基礎
- 使用迴圈執行重複性質的工作
- 動手做 3-1 使用 while 執行已知次數或無限重複的工作
- MicroPython的互動解譯器模式(REPL)操作說明
- 上傳程式檔到ESP8266控制板
- 負載的接法:源流與潛流
- 動手做3-2 自行連接LED
- 用歐姆定律計算出限流電阻值
第4章 開關電路
- 認識開關
- 開關電路與上/下拉電阻
- 動手做4-1 用麵包板組裝開關電路
- 改變程式流程的if條件式
- 動手做4-2 LED切換開關
- 動手做4-3 用RC電路消除開關彈跳訊號
- 電容式觸控開關
- 動手做4-4 使用觸控開關模組製作LED開關
第5章 Python程式設計基礎
- 變數與資料類型
- 建立自訂函式
- 自訂程式庫與常數定義
- 處理文字訊息:認識字元與字串資料類型
- 列表(List)類型
- 元組(Tuple)與其他循序型資料操作指令
- 字典(Dictionary)類型
- 認識數字系統
第6章 Wi-Fi 無線網路
- 認識無線區域網路與Wi-Fi
- 從網頁瀏覽器操作MicroPython控制板
- 設定ESP8266以 STA(基站)模式連接無線網路
- 修改boot.py檔、開機自動連線
- 其他網路相關指令
- bytes(位元組)類型與字元編碼
第7章 序列埠通信
- 並列與序列通訊簡介
- DHT11數位溫濕度感測器
- 動手做7-1 製作數位溫濕度計
- 認識UART序列埠
- 建立UART序列通訊程式物件
- 動手做7-2 連接GPS模組
- 認識NMEA標準格式與獲取GPS的經緯度值
第8章 數位調節電壓強弱與全彩LED控制
- 使用Timer(計時器)定時執行程式
- 動手做8-1 使用定時器閃爍LED
- 使用try…except捕捉例外狀況
- 用匿名函式(lambda)改寫閃爍 LED 程式
- 數位調節電壓變化
- 動手做8-2 呼吸燈效果
- 控制全彩 LED
- 動手做8-3 控制RGB全彩LED
- 旋轉編碼器
- 動手做8-4 連接旋轉編碼器與ESP8266控制板
- 動手做8-5 使用旋轉編碼器調整LED色彩
- WS2812彩色LED模組與燈條
- 動手做8-6 調控WS2812的色彩
- 動手做8-7 跑馬燈效果
第9章 電晶體與蜂鳴器和直流馬達控制
- 認識電晶體元件
- 發音體和聲音
- 動手做9-1 發出警報聲響
- 動手做9-2 電流急急棒
- 彈奏音樂
- 動手做9-3 演奏一段瑪莉歐旋律
- 認識直流馬達
- 動手做9-4 電晶體馬達控制與調速器
第10章 控制伺服馬達
- 認識伺服馬達
- 動手做10-1 伺服馬達的控制程式
- 自訂類別:遠離義大利麵條
- 動手做10-2 編寫控制伺服馬達的自訂類別
- 動手做10-3 吃錢幣存錢筒
- 繼承:建立子類別
- 動手做10-4 隨機轉動標靶
第11章 類比信號處理
- 讀取類比值
- 動手做11-1 讀取類比值並調控LED亮度
- 認識光敏電阻與分壓電路
- 動手做11-2 使用光敏電阻製作小夜燈
- 壓力感測器與彎曲感測器
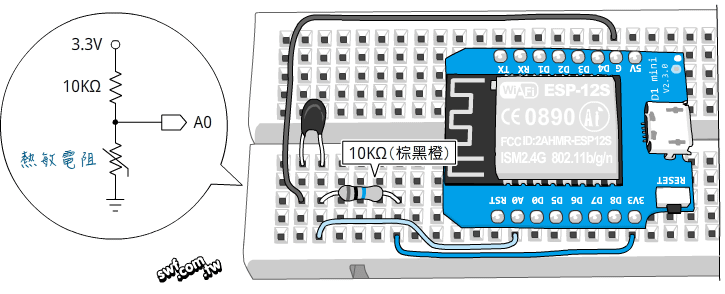
- 熱敏電阻
- 動手做11-3 使用熱敏電阻測量溫度
- 動手做11-4 雷射槍玩具標靶
- 電容式麥克風元件與聲音放大模組
- 動手做11-5 拍手控制開關
- 動手做11-6 拍手控制開關改良版
第12章 I2C介面:連接週邊與擴充ESP8266的類比輸入埠
- 認識I2C介面
- 類比轉數位(ADC)的專用IC介紹
- 動手做12-1 連接PCF8591類比轉數位模組和I2C介面
- 動手做12-2 自製二軸雲台(機械手臂)
- 使用OLED顯示器顯示文字訊息
- 動手做12-3 使用ssd1306程式庫操控OLED模組
- 自訂顯示圖像
- 動手做12-4 在OLED上顯示自訂符號
- 使用LCD Assistant軟體轉換圖像
- 動手做12-5 在OLED顯示動態溫濕度值
第13章 超音波距離感測器與I2C直流馬達驅動控制板實驗
- 認識超音波
- 動手做13-1 使用超音波感測器製作數位量尺
- 建立超音波自訂類別與發出自訂例外錯誤
- 動手做13-2 超音波距離控制燈光亮度
- 控制馬達正反轉的H橋式馬達控制電路
- WEMOS馬達擴展板
- 動手做13-3 自動迴避障礙物的自走車
- 用MicroPython改寫WEMOS原廠的Arduino馬達驅動程式庫
- 位移和邏輯運算子
第14章 製作GPS軌跡記錄器
- 讀取與設定本機時間
- 動手做14-1 在OLED螢幕顯示GPS定位的台北時間
- 使用os程式庫操作檔案
- 建立與寫入檔案
- 輪詢VS中斷
- 動手做14-2 使用中斷要求開、關LED
- 動手做14-3 建立儲存GPS紀錄的CSV格式檔案
- 在谷歌地圖呈現GPS移動軌跡
第15章 SPI介面控制:LED矩陣和MicroSD記憶卡
- LED矩陣元件
- 認識SPI介面與MAX7219 IC
- 動手做15-1 組裝LED矩陣電路
- 顯示單一矩陣圖像
- 動手做15-2 在 LED 矩陣上顯示音符圖像
- 動手做15-3 在終端機顯示矩形排列的星號
- 動手做15-4 LED矩陣動畫與多維序列資料程式設計
- 動手做15-5 連接MicroSD/SD記憶卡
第16章 網路程式基礎入門
- 認識網路與IP位址
- 網域名稱、URL網址和傳輸協定
- 網路的連線標準與封包
- 使用Socket建立網路通訊程式
- 動手做16-1 使用Socket建立一對一通訊程式
- 認識網頁與HTML
- 認識HTTP通訊協定
- 動手做16-2 連結網站的用戶端程式
- 認識HTTPS加密連線
第17章 物聯網應用初步
- 建立網站
- 動手做17-1 建立網站伺服器
- 動手做17-2 動態顯示溫濕度資料
- 動手做17-3 讀取並顯示HTML網頁和圖像
- 認識 ThingSpeak物聯網雲端平台
- 透過查詢字串傳遞資料
- 動手做17-4 用urequest程式庫上傳資料到ThingSpeak平台
- 使用POST方法傳遞資料
- 解析查詢字串
- 動手做17-5 搭配互動網頁介面的燈光調控器
- 控制家電開關
- 動手做17-6 使用繼電器控制家電開關
第18章 物聯網應用
- 網路應用程式訊息交換格式:XML與JSON
- 動手做 18-1 讀取JSON格式的世界各地天氣資料
- 動手做 18-2 在OLED螢幕顯示氣象資訊
- 認識MQTT
- 動手做18-3 使用ESP8266發布資料到ThingSpeak MQTT伺服器
- 動手做18-4 訂閱ThingSpeak MQTT訊息
- ESP8266微控器的即時鐘(RTC)
- 動手做18-5 透過網際網路更新時間
- 超低功耗的深度睡眠模式
- 動手做18-6 進入深度睡眠與喚醒微控器
- 動手做18-7 自動睡眠、喚醒並上傳資料到ThingSpeak平台
附錄A uPyCraft與Tera Term使用說明
- uPyCraft整合開發工具使用說明
- 使用Tera Term終端機軟體
附錄B 編譯客製化的MicroPython韌體
- 在Windows 10系統中安裝與執行Linux工具軟體
- 交叉編譯MicroPython韌體
- 從Linux環境複製檔案到Windows環境
- 建立客製化的MicroPython韌體
內容勘誤
第3章 MicroPython基本操作
3-20頁,上方程式編輯器裡的while i in range(3):敘述,正確是for i in range(3):
第4章 開關電路
4-14頁,底下程式第一行的time=5,正確是time=15。
第5章 Python程式設計基礎
5-19頁,中間程式第一行id=12,正確是num=12。
第7章 序列埠通信
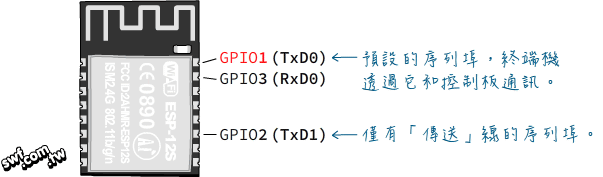
7-18頁,下方團片中的GPIO11,正確是GPIO1。
7-28頁,最後一段的第13章,正確是第14章。
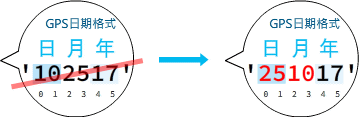
7-48頁以及14-5頁,GPS日期格式的圖說中,日、月數字顛倒。
第8章 數位調節電壓強弱與全彩LED控制
8-4頁,底下的ujon程式碼,D1 = ”’,正確是 data = ”’
8-28頁,實驗程式第一行,from machine import Pin,正確是from machine import Pin, PWM
第9章 電晶體與蜂鳴器和直流馬達控制
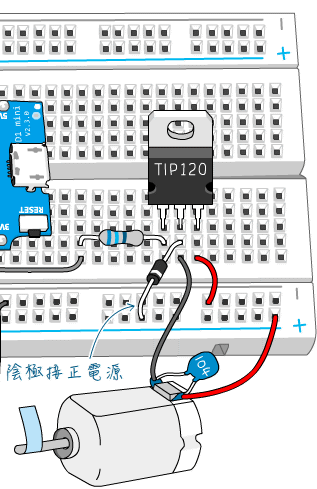
9-22頁,TIP120馬達驅動電路,TIP120的E(射極)要接地,馬達一端要接正電源。
9-23頁,中間內文(參閱第12章介紹),正確是第13章。
第10章 控制伺服馬達
10-2頁,第二段文字中的參閱第10章,正確是第8章。
第11章 類比信號處理
11-29頁,「增加拍手次數」註解底下的 print(‘claps: ‘ + claps),正確是print(‘claps: ‘ + str(claps))。
第12章 I2C介面:連接週邊與擴充ESP8266的類比輸入埠
12-25頁,最下方程式碼當中的 oled.framebuf.blit,正確是oled.blit。
12-30頁,程式碼當中的 self.oled.framebuf.blit,正確是self.oled.blit。
第16章 網路程式基礎入門
16-32頁,程式碼當中的 wlan = network.WLAN(network.waln),正確是wlan = network.WLAN(network.STA_IF)。
第17章 物聯網應用初步
17-7頁,程式碼當中的 client.send(httpHeader.format(temp, humid)),正確是client.send(httpHeader.format(temp=temp, humid=humid))。
第18章 物聯網應用
18-10頁,「實驗說明」中的動手做11-3,正確是12-3。
18-11頁,內文中間的第11章,正確是第12章。
18-14頁,程式碼第2行的 oled.framebuf.blit(fb, 0, 15),正確是oled.blit(fb, 0, 15)。
老師你好:
我在課本 7-22 頁的部分,照著書上程式碼撰寫
from machine import UART
com = UART(0, 9600)
com.init(9600)
while True:
data = com.readline()
if data and (“$GPRMC” in data):
print(data)
測試很多次,都沒辦法進行 $GPRMC 的filter
每次還是都會把所有的句子print出來
找不出原因,麻煩老師解答,謝謝
我剛剛用MicroPython 1.9.4以及1.11版本的韌體測試沒有問題,請問原始字串裡面包含”$GPRMC”嗎?
在1.11版的韌體上初始化序列埠之前要先執行dupterm()關閉REPL,避免終端機把序列埠輸入的資料當作命令執行。像這樣:
thanks,
jeffrey
赵老师,您好:
12-3节使用OLED显示器显示文字信息,书中有写到:MicroPython内建控制OLED屏幕的ssd1306程式库,可是我在MicroPython官方文档中未找到该库的信息 http://docs.micropython.org/en/latest/library/index.html 我想问赵老师,您是在哪里可以查看该程式库的相关属性及方法呢?
MicroPython的SSD1306庫源代碼在Github這裡。
thanks,
jeffrey
赵老师,是不是可以这样理解,在给d1 mini 板刷入microPython固件时,其实ssd1306库的二进制代码已经包含在固件里面了,源代码并没有放在固件里,我们需要引用这个库时,只要在代码中import ssd1306 就可以使用了。 如果想要查阅该库的实现,也就是阅读源代码,可以查阅MicroPython在GitHub上的托管。 是这个意思吗?
是的,ssd1306库的二进制代码在编译MicroPython固件时,一并被包含进去了(请参阅附录B)。
因为ssd1306不是标准库,所以需要用import叙述引用。
通常,程序员写好新的库,都会同时编写API的说明文档以及使用例;如果没有,我们只好通过阅读源代码里来理解。
thanks,
jeffrey
老師你好:
我在課本 9-22 頁的部分,照著書上電路接線
唯一差別是 : DC-DC板我是用 9V Adaptor接 DC-in孔
且測試 Pin(13)確實有PWM輸出
但馬達就是不會轉
直接拿3號電池接馬達測試也可正常轉動
不知為何照課本接線,馬達無法轉動,麻煩老師解答,謝謝
不好意思,請參閱上文底部的勘誤,
TIP120馬達驅動電路,TIP120的E(射極)要接地,馬達一端要接正電源。
thanks,
jeffrey
老師你好:
課本 14-4 頁在室外實作後()
OLED 顯示的 日期、時間 都正確
但 經、緯 度顯示都是 0
請問 是哪裡設定錯了嗎,謝謝
經緯度都是0,應該是GPS模組暫時收不到定位訊號,請再等一陣子或者換個地方,就能收到定位訊號了。
thanks,
jeffrey
赵l老师,您好:
动手做13-1,书中提到:超声波模组Echo输出5V,但ESP8266接脚只能接受3.3V输入,方法是采用右图电阻分压电路,由于超声波的输出电流很小,我们可只用一个1千欧-3千欧左右电阻达成目的。 对于此处描述这里我有疑惑:1.Echo输出的5V,应该是理论上的5V吧,我觉得IO引脚内部应该也有一个等效的电阻的吧,一旦外部接上分压电路,esp8266引脚真的能分到3.3V吗? 我越想越糊涂,赵老师能给点拨一下吗 2. 文中说只用一个电阻,不用分压,也能达到目的,这是为什么?
对,请想像串接电阻的另一边接了一个负载(R2),相当于形成一个电阻分压电路。我以前测试连接HC-05蓝牙模块时,用1KΩ、2.2KΩ和4.7KΩ测试,4.7KΩ已经是极限了,电阻值再提高,蓝牙模组就收不到信号了。
不过,这种接法仅限于低速通讯(几百KHz以内)线路,I2C之类的高速通讯线路,需要采用如12-25页的MOSFET元件。
thanks,
jeffrey
老師你好:
課本 9-22 頁的部分,有依照你的回答再次確認過電路接線無誤
TIP120馬達驅動電路,TIP120的E(射極)有接地,馬達一端也有接正電源。
Pin(13)確實有PWM輸出
馬達還是不會轉動
唯一差別是 : DC-DC板我是用 9V-0.8A Adaptor接 DC-in孔
請問老師,會是 9V-0.8A Adaptor電流不足,或者是其它問題嗎
謝謝
有可能是電流不足,要看是哪一種馬達。你也可以先在MOSFET接馬達的位置,改接一個電阻和LED,看看能否調整LED的亮度。
thanks,
jeffrey
請問一下,
mpy怎麼在WINDOW下產生跟使用
mpy只能在MicroPython控制板執行,編譯方式請參閱附錄B。
thanks,
jeffrey
赵老师:
我在windows 10 的命令行界面下,使用pip install esptool 命令成功安装好 esptool工具。为何在命令行界面中输入:esptool.py — port com4 erase_flash ,系统报错:’esptool.py’ 不是内部或外部命令,也不是可运行的程序
或批处理文件。 什么原因呢?
请尝试升级esptool(我的系统有Python 2,所以pip命令是pip3):
pip3 install –upgrade esptool
或者先移除已安装的esptool,再重新安装试试:
pip3 uninstall esptool
thanks,
jeffrey
后来我发现,把这个路径C:\Users\Administrator\AppData\Local\Programs\Python\Python35-32\Scripts 加入了系统环境变量path中,就可以执行esptool命令,而且我在命令行界面里输入的是 esptool 并非esptool.py,经测试输入esptool.py 反而报错。
赵老师:刚才又遇到一个问题:就是用pip安装ampy,提示安装成功,而且我发现ampy.exe这个程序也是在C:\Users\Administrator\AppData\Local\Programs\Python\Python35-32\Scripts这里目录里,可是这次我在命令行里输入ampy命令,却报出了一堆错误,我个人感觉应该和esptool一样,为什么却执行不了?错误提示如下:
Traceback (most recent call last):
File “c:\users\administrator\appdata\local\programs\python\python35-32\lib\runpy.py”, line 170, in _run_module_as_main
“__main__”, mod_spec)
File “c:\users\administrator\appdata\local\programs\python\python35-32\lib\runpy.py”, line 85, in _run_code
exec(code, run_globals)
File “C:\Users\Administrator\AppData\Local\Programs\Python\Python35-32\Scripts\ampy.exe\__main__.py”, line 5, in
File “c:\users\administrator\appdata\local\programs\python\python35-32\lib\site-packages\ampy\cli.py”, line 30, in
import dotenv
File “c:\users\administrator\appdata\local\programs\python\python35-32\lib\site-packages\dotenv\__init__.py”, line 2, in
from .main import load_dotenv, get_key, set_key, unset_key, find_dotenv, dotenv_values
File “c:\users\administrator\appdata\local\programs\python\python35-32\lib\site-packages\dotenv\main.py”, line 10, in
from typing import (Dict, Iterator, List, Match, Optional, # noqa
ImportError: cannot import name ‘TYPE_CHECKING’
了解,请参阅1-14和1-16页,你应该是忘记勾选「把Python 3.x加入系统路径」的选项了。
thanks,
jeffrey
老师你好:
请教一个问题,我买了块esp32开发板,刷入micropython固件,我想问如何操控板上的蓝牙呢?有没有简单的范例呢?
根据micropython.org论坛的这一篇讨论,预计2.0版才会支援ESP32的Bluetooth BLE(低功耗蓝牙)。
thanks,
jeffrey
赵老师,您好:
有一个想法如下,当不知道如何实现?:
让ESP8266作为AP运行,并启动一个HTTP服务器,并配置HTML页面,用户请求该页面,让用户输入Wi-Fi网络名称和密码,然后esp就可以STA模式用该名称和密码链接wifi,访问互联网。我现在疑惑是:用户POST方式提交的数据,esp服务端是如何获取用户提交的数据呢?赵老师,您是否有相关的demo?或者说get方式也行的吧,esp后端是如何获取用户提交的数据?
1.请参考这个WiFi Manager(无线网路管理员)的例子。
2. POST方法请参见17-26“使用POST方传递资料”
3. GET方法请参见17-28页“解析查字串”
thanks,
jeffrey
谢谢赵老师,您太厉害了,崇拜你^_^!!
不客气,我只不过是转达他人的研究成果。
thanks,
jeffrey
老師你好,想請問有沒有推薦MAC的燒入,灌完micropython 後用uPycraft我的d1mini都是忙線中請問該怎麼解決
請問在燒錄韌體之前,你有先清除快閃記憶體嗎?
在Mac上我都用esptool.py工具,這裡有個基於esptool的圖形操作介面燒錄軟體”nodemcu-pyflasher”,在這個專案的Release頁面可以下載編譯好的macOS和Windows版。
燒錄之前,Erase flash(清除Flash)選項,請選擇”yes, wipes all data”(清除全部資料)。
thanks,
jeffrey
請問在燒錄韌體之前,你有先清除快閃記憶體嗎?
有的,後來改用screen後是可以燒錄但還是覺得用的不是很方便
請問老師用esptool.py程式碼都用什麼編寫跟儲存?
謝謝老師
你是指Python語言的程式編輯器嗎?我都用Visual Studio Code。
thanks,
jeffrey
老師您好
在試做第12-20頁執行到這行:oled = ssd1306.SSD1306_I2C(128,64,i2c)
會出現Error Code如下:
File “ssd1306.py”, line 99, in init
File “ssd1306.py”, line 36, in ini
File “ssd1306.py”, line 61, in init display
File “ssd1306.py”, line 104, in write cmd
OSError: [Errno 110] ETIMEDOUT
請問是什麼問題 謝謝您~
請檢查OLED螢幕接線,或者更換連接線再試試。
thanks,
jeffrey
老師你好
請問在課本P11-17電路中,我的分壓電阻用 2.2K
也將11-18中程式改寫成,如下:
from machine import ADC
adc = ADC(0)
def temp(adcV, R0=2200, R25=10000, T0=25, beta=3950):
from math import log
r = (adcV * R0)/(1023 – adcV)
T0 += 273.15
return 1/(1/T0 + 1/beta*log(r/R25)) – 273.15
val = adc.read()
t = temp(val)
print(“temp:”, t)
但抓到的溫度值,都只有19.xxx度
試過許多次,也檢查了接線
麻煩老師指導,謝謝
根據你的自訂函式參數,最後一行的return應該改成:
return 1/(1/T0+1/beta*math.log(r/R25))-273.15
請用三用電錶測量熱敏電阻的電阻值,在不同溫度底下,它的阻抗應該要有變化。
thanks,
jeffrey
赵老师:动手做15-5连接sd记忆卡,在import sdcard 模组时,提示‘no moudle named ‘sdcard’ ’ 我用help(‘modules’)列出microPython固件中的模块,的确没有sdcard模块,这个固件我是从microPython官网下载的固件安装包,按书本上提示烧录的,老师你是从哪里下载的?用的是哪个版本呢? putty上提示:MicroPython v1.11-8-g48dcbbe60 on 2019-05-29; ESP module with ESP8266
感谢告知!
我使用1.8.x版本的固件有自带sdcard库,
请下载sdcard.py,
用ampy将它传入ESP8266。
thanks,
jeffrey
老師你好
請問在課本P12-14的應用,如何將I2C讀到的熱敏電阻值換算成實際溫度值,謝謝
我們需要幾項數據才能轉換出正確值:
熱敏電阻的規格
分壓電阻(R0)的值
PCF8591的類比數位轉換值是8位元,0~255。
根據賣家提供的電路圖,分壓電阻是1KΩ,但沒有註明熱敏電阻的規格,請修改11-17頁的熱敏電阻轉換公式,1023改255,R0改1K試試。
thanks,
jeffrey
赵老师:
注册ThingSpeak账号,页面提示输入,Email address: 我输入的是大陆网易163邮箱,其它几个栏位按要求填入,点击continue,页面提示警告:Personal Email Detected :To use your organization’s MATLAB, enter your work or university email 。 不过下方有个勾选框,Use this email for my MathWorks Account ,我勾选后,点击继续。注册成功。问题现在我点击登录页,输入email,点继续,没有任何反应。而且整个注册过程中,没有提示我设置登录密码。我现在用翻墙软件,访问登录页,输入email,点继续,提示我输入登录密码????问题是我在注册的过程中,根本就没有设置过登录密码呀。
赵老师,您是怎么注册账号的呀?? 有没有可用账号分享一个
蛤?为何ThingSpeak网站会被和谐?
我记得注册帐号之后,它会寄出一封确认邮件,请检查看看是否被丢到垃圾分类里面了。
thanks,
jeffrey
老師你好:
請問課本P12-27的圖像和文字,老師是用什麼軟體編輯。
因為我用小畫家編輯出來的文字,最後在OLED上顯示出來,都是缺邊缺角的。
謝謝。
開啟小畫家之後,選擇主功能表的「檔案→內容」,把影像檔色彩設定為「黑白」。
存檔時,選擇「檔案→另存新檔」,「存檔類型」選擇「單色點陣圖」。
thanks,
jeffrey
老師你好:
請問課本P13-13
led = Signal(ledPin, invert=True)
上列這行程式執行後,會顯示
TypeError: can’t convert PWM to int
請問應該如何修改,謝謝。
也許是韌體的bug,因為1.11版的Signal指令說明文件也提到它支援PWM物件。
請把PWM設定敘述改成:
led = PWM(Pin(2), freq=1000) # led接在第2腳
然後刪除Signal()的敘述;LED元件改成外接(要串接一個電阻,參考3-24頁的電路)。
另外,我後來測試SR04超音波感測器,可以採3.3V供電,如此,Echo腳也就不必串接電阻。
thanks,
jeffrey
老師你好:
我照著課本 P15-8接線,程式碼也和課本 P15-14相同
但實際執行後,LED矩陣 沒有被點亮
請問應該如何修改,謝謝。
書本的程式和接線沒問題,請檢查你的線路是否接觸不良。
thanks,
jeffrey
不好意思,我也遇到一樣的問題,我也很確定硬體連接正確,沒有接觸不良. 但LED沒有反應. 請問應該如何debug? 請問要如何透過SPI指令讀取MAX7219確認數值真的有寫入?
底下照片是依照15-8頁的接線,執行diy15_2.py程式的結果,測試無誤。
MA7219不會回應收到的資料,若要檢查電路的訊號是否正常傳送,可用邏輯分析儀檢測,不過我們一般都不會買這種儀器;若接線確認正確無誤…那應該是模組本身有問題。
thanks,
jeffrey
你好,我找到問題了, 增加baudrate設定後, 就都可以正常工作了: spi = SPI(1, baudrate=600000)
謝謝
非常感謝naiwei的分享!
thanks,
jeffrey
趙老師您好,
我是您Python物聯網的忠實讀者,從您書上獲益深廣,至為感謝 !
近日想試試PM2.5感測電路的實作,鎖定了sharp之GP2Y1051AU0F感測元件,
找了網路上相關的資源,也接上了線路,但始終無法獲取來自GP2Y1051AU0F
的data, 查了相關的網路訊息,也把TX0/RX0給讓出來,利用WebREPL進行連線
開發,也將 baudrate設定為2400,但未能成功讀到任何資料,煩請您賜教啊~
至為感謝 !
我的測試code如下 :
———————————-
from machine import UART
def run()
serial = UART(0, 2400)
serial.init(2400)
# ———————–
while True:
data = serial.read()
if data:
print(data)
else:
print(“.”)
———————————-
拍謝,我手邊沒有這個用序列埠傳送空氣品質的檢測模組,無法驗證,上網查了一下相關模組,有些需要先傳送訊號給它,點滅PM 2.5感測器裡的LED,才能進行測量。
thanks,
jeffrey
老师您好 请问我可以将您书中的部分插图用于我的硕士毕业论文中吗
没问题~烦请标注引用来源。
thanks,
jeffrey
老師你好,
課本P16-30,也就是範例程式 diy16_2,亦即直接建立位元組字串的方式
實測無法正確執行,實際回應如下:
74
HTTP/1.1 400 Bad Request
Date: Tue, 10 Dec 2019 12:00:10 GMT
Server: Apache
Content-Length: 417
Connection: close
Content-Type: text/html; charset=iso-8859-1
400 Bad Request
Bad Request
Your browser sent a request that this server could not understand.
Additionally, a 400 Bad Request
error was encountered while trying to use an ErrorDocument to handle the request.
Apache Server at box5680.bluehost.com Port 80
請問老師,有什麼地方可加以修正嗎?
謝謝。
拍謝,那是我的網站伺服器最近更新了,MicroPython程式連到MicroPython.org網站提供的測試網址沒問題:http://micropython.org/ks/test.html
連到我的網站,HTTP標頭欄位後面要用”\r\n”,不可只用”\n”結尾。所以請把HTTP標頭改成:
httpHeader = b'''\ GET /{path} HTTP/1.1\r Host: {host}\r User-Agent: MicroPython\r \r '''thanks,
jeffrey
老師你好,
課本P16-35,即範例程式 https
如果也按照老師上述所教 : HTTP標頭欄位後面要用”\r\n”,不可只用”\n”結尾
並且以老師的網址下去做測試,實際回應如下:
ssl_handshake_status: -40
Traceback (most recent call last):
File “”, line 12, in
OSError: [Errno 5] EIO
請問老師,應該如何修正
謝謝。
根據MicroPython原始碼專案的這個問題回應,MicroPython尚未支援所有加密方案,例如,DHE或ECDHE,所以某些網站會回應錯誤。
thanks,
jeffrey
老師你好,
課本P17-18,將程式貼入終端機執行,實測無法正確執行,回應如下:
Traceback (most recent call last):
File “”, line 86
SyntaxError: invalid syntax
line86 是 f = open(WWWROOT+fileName, ‘r’)
我看不出哪裡有錯,請問老師知道問題在哪嗎?
謝謝。
麻煩對照ch17的http_file.py檔,我剛剛測試沒問題。
thanks,
jeffrey
老師你好,
在你的網站,網址 https://swf.com.tw/?p=1201
有一篇教學文章 : 使用select()改寫存取網頁檔案的MicroPython網站伺服器程式
我實作後發現在瀏灠器上會發生:
只顯示,歡迎來到MicroPython世界!
底下的圖片就顯示不出來了。
但如果是以 原本 課本17-14頁的程式執行,是沒問題的
請問老師,程式哪裡有問題需要修改嗎?
謝謝。
老師你好,
關於上一個問題,即
在你的網站,網址 https://swf.com.tw/?p=1201
有一篇教學文章 : 使用select()改寫存取網頁檔案的MicroPython網站伺服器程式
我剛剛實際用:
1. 筆電上的Chrome browser,大約5次成功傳圖1次,共實測50次
2. 手機上的Chrome browser,大約5次成功傳圖4次,共實測50次
以上資訊,謝謝
我本週六試試。
thanks,
jeffrey
我剛剛把select()的超時秒數設定成2和3測試:
Windows 10的Chrome瀏覽器沒有載入圖檔的機率很高
Android的Chrome約1/10
iOS版的Safari瀏覽器約1/10
Windows 10的Edge瀏覽器沒問題
thanks,
jeffrey
剛才改用ESP32上傳本文的程式碼,在電腦和Android手機的Chrome測試沒問題,
本週我會更新文章說明。
thanks,
jeffrey
感謝老師之前回答的問題,目前使用書上wifi網頁控制程式都沒問題了,自己增加了時鐘模組、溫濕度等程式進入,會發現記憶體不足問題,我也更改為ESP32模組下,還是發生記憶體不足問題,請問有其他型號或方法擴充記憶體嗎?
如果無法精簡程式的話,我會改用Arduino(C/C++語言),MicroPython使用方便,但是Python直譯器會佔用記憶體空間。
thanks,
jeffrey
老師你好,
關於網址 https://swf.com.tw/?p=1201,這篇教學文章 : 使用select()改寫存取網頁檔案的MicroPython網站伺服器程式。
因為瀏覽器沒有載入圖檔的機率很高,老師有提到會更新文章說明,
麻煩老師有空時再更新文章幫我們解惑說明,
謝謝您。
請參閱「使用ESP32控制板(二):燒錄MicroPython韌體」,採用LOLIN32控制板,燒錄MicroPython韌體。
接著執行ampy命令上傳boot.py, www資料夾和上文的程式,即可測試。
thanks,
jeffrey
老師你好!
程式中
MicroPython
其中img src=”img/python.png”路徑中的圖片無法正常顯示請問是什麼原因,如果把路徑換成圖片網址才可以正常顯示。期待您的回答謝謝您。
之前有類似的問題,我後來是直接改用ESP32來解決這個問題,相關貼文提供你參考:
Python的非阻塞式(non-blocking)socket通訊程式(一)
Python的非阻塞式(non-blocking)socket通訊程式(二):使用select程式庫
使用ESP32控制板(一):WEMOS LOLIN32簡介
使用ESP32控制板(二):燒錄MicroPython韌體
使用ESP32控制板(三):MicroPython的類比輸入、UART序列埠以及觸控開關
thanks,
jeffrey
請問一下我在安裝完putty, 依照書中指示填入參數按open後。視窗開啟不會出現命令提示字元,而是一直直在scan. 請問是為什麼呢? 網路上好像沒看到類似的問題。
我也沒遇過這個情況,請問在燒錄MicroPython韌體之前,你有先清除Flash,快閃記憶體容量有選擇成32Mbit嗎?
thanks,
jeffrey
老師您好!
請問如果ESP設為網路卡時,連接無線基地台為192.169.4.1,要指定自己的IP位置如:192.168.4.10,請問要如何設定?
請參閱6-14頁「設定靜態IP」說明。
thanks,
jeffrey
請問老師:
依書本中的13-19 頁,接好WEMOS 馬達擴展板和D1 Mini, 也將擴展板待機接脚, 接到了D1 Mini 的3.3V 接脚(尚未接馬達電源及馬達)
但因所附的擴展板的插槽是母的, 所以我接只能是擴展板在下, 而D1 Mini在上
書中的圖則是擴展板在上, 而D1 Mini在下
連接USB 線至D1 Mini 後, 我想先SCAN一下擴展板的I2C 位址
所以我用在WINDOWS 執行Putty, 並使用終端機輸出下述指令:
from machine import I2C,Pin
i2c=I2C(scl=Pin(5),sda=Pin(4),freq=100000)
i2c.scan()
但結果回傳的卻是空的List
[]
表示並未SCAN到該擴展板的I2C 位址
想請問老師可能原因為何??
Steven
通常是因為模組上的32位元微控器沒有燒錄所需的韌體,請參閱13-23頁說明。
thanks,
jeffrey
請問老師:
我依13-23頁說明, 燒錄了motor_shield.bin 至32位元微控器, 再重新接回D1 Mini
並使用終端機輸出下述指令:
from machine import I2C,Pin
i2c=I2C(scl=Pin(5),sda=Pin(4),freq=100000)
i2c.scan()
但結果回傳的仍是空的List
[]
想確認一下:
1. scan I2C address時, 馬達的電源有必要接到motor shield?
2. motor shield 的接脚S, 是不要接到3.3 V
另外在網路上有看到一些針對該motor shield 韌體有Bug的文章, 且有人寫了新的韌體
是否和這有關??
Steven
掃描I2C週邊時,馬達驅動板的電源只要接3.3V和接地,馬達的電源和SS不用接。
目前最新的WEMOS馬達驅動板是2.0版,我買的是1.0板,燒錄書本附帶的韌體沒有問題。
請用電錶的歐姆檔,測量馬達驅動板的STM32F03微控器的19和20腳,看看是否有連接到SDA和SCL腳。
thanks,
jeffrey
請教老師:
我另買一台馬達驅動板,燒錄https://hackaday.io/project/18439-motor-shield-reprogramming的新韌體
再去scan I2C位址, 這次可以Scan 到[48],正常
但依老師的接線接好馬達
並燒錄wemotor.py 及hcsr04.py 到D1後, 再燒錄13-29 的程式成main.py 至D1,
重置D1 後, 用Putty 去看, 發現setMotor原來是寫:
motor.setMotor(wemotor.CW)
Puttyutty告知少了一個參數, 所以我修改主程式中的setMotor加入轉速, , 如下:
motor.setMotor(wemotor.CW,50)
再重燒錄後Reset D1
發現hcsr04 有測到距離, 但馬達驅動板卻沒法子驅動馬達
我也有接S 接脚至D1 3.3V, 也有另接6V 的馬達電源, 但馬達卻不會動
但程式也沒有當掉
是否這一版的wemotor.py 有bug?? 還是我那做錯了
請老師指導
Steven
抱歉,13-29頁的馬達設定,要像13-22頁的setMotor()方法的說明,加上速度參數,感謝告知!
我用最新的MicroPython韌體(1.8.12),加上書本的馬達控制板韌體以及wemotor.py測試,沒問題。請先依照13-22頁的說明測試馬達轉動。
thanks,
jeffrey
請教老師:
MicroPython ESP8266 韌體在官網中的最新版本為esp8266-20191220-v1.12.bin
我用的是這一版本的韌體, 測試結果馬達不動, 且也有用Putty,以13-22頁的說明測試馬達轉動
但馬達不動
老師所提的MicroPython韌體(1.8.12),指的是esp8266-20191220-v1.12.bin ??
Steven
哎…我又打錯字了,是1.12版沒錯。請問你有試過書本的馬達驅動板的韌體版本嗎?
thanks,
jeffrey
請教老師:
我在Putty中, 輸入:
>>> from machine import I2C, Pin
>>> import wemotor
>>> i2c = I2C(scl=Pin(5), sda=Pin(4), freq=1000)
>>> i2c.scan()
[48]
>>> i2c.writeto(0x30,b’\x10\x02\x03\xe8′)
0
最後一行指令, 依書上說明, 應會使馬達以轉速1000, 以逆時針轉
但它return 0, 且馬達未作動, 請問老師 return 0 的意義是??
steven
你的I2C頻率設定太低了,請改成100000。
i2c.write()的傳回值是寫入的位元組大小,以底下令馬達B以轉速5000,逆時針方向旋轉的敘述為例:
i2c.writeto(0x30, b’\x11\x02\x13\x88′)
它的傳回值是4,因為送出的資料是4個位元組。
thanks
請教老師:
依老師指導, I2C頻率改成100000, 重測已能回傳4
但馬達仍是不動
那表示I2C 通訊沒有問題, 接下來應是STM32F03 控制TB6612FNG 為何不WORK
假設馬達驅動板的韌體沒問題, 先請老師協助確認接線:
1. 待機的接脚固定接到D1 3.3V
2. 待機接脚後的4個接脚, 依序接左馬達+,-; 以及右馬達-+
3. 第6支接脚接外接電源- (外接4個1.5V 乾電池)
4. 第7,8 支接脚不接(因擴展板有二個GND,二個VM, 所以我只任取2個來接)
5. 第9支接脚接外接電源+
感謝老師協助
Steven
接線沒錯,13-28頁的電路是正確的。
thanks,
jeffrey
老師您好:
我用d1 mini pro執行程式時,經常會遇到自動復位的問題。
如下(cause有時是4)
ets Jan 8 2013,rst cause:2, boot mode:(3,6)
load 0x40100000, len 31088, room 16
tail 0
chksum 0x44
load 0x3ffe8000, len 1028, room 8
tail 12
chksum 0x1e
ho 0 tail 12 room 4
load 0x3ffe8410, len 824, room 12
tail 12
chksum 0x89
csum 0x89
可以請教如何解決嗎?
感謝老師
請問你燒錄韌體時,快閃記憶體的容量是選擇32Mb (4MB) 嗎?雖然pro板的快閃記憶體是16MB (128Mb),但是ESP8266版的MicroPython的預設Flash容量是32Mb。
如果要充分運用128Mb容量,可能要自行從原始碼編譯一個,請在make命令(參閱B-10頁)後面加上FLASH_SIZE=128m參數試試看:
make FLASH_SIZE=128m
thanks,
jeffrey
16-31頁,執行結果如下,請問原因為何?
74
HTTP/1.1 400 Bad Request
Date: Tue, 24 Mar 2020 09:02:02 GMT
Server: Apache
Content-Length: 417
Connection: close
Content-Type: text/html; charset=iso-8859-1
400 Bad Request
Bad Request
Your browser sent a request that this server could not understand.
Additionally, a 400 Bad Request
error was encountered while trying to use an ErrorDocument to handle the request.
Apache Server at box5680.bluehost.com Port 80
>>>
拍謝,請參閱這一則回應。
thanks,
jeffrey
老師的書真的很淺顯易懂,不知老師有沒有規劃寫一本有關 raspberry pi/jetson nano這類的書呢?
非常感謝fong的肯定,我今年內沒有raspberry pi書籍的規劃。
thanks,
jeffrey
我曾於2020/3/24提出: 16-31頁,存取未加密網站,出現異常(Bad Request),請問原因為何?
經多日檢查: 發現範例程式中, httpHeader宣告有小問題,Host: {host}中的”:”與”}”必須留一個空白,才可執行成功,如下所示。
httpHeader = b”’\
GET /{path} HTTP/1.0
Host: {host}
User-Agent: MicroPython
HTTP/1.1 200 OK
Server: nginx/1.10.3
Date: Mon, 30 Mar 2020 07:59:27 GMT
Content-Type: text/html
Content-Length: 180
Last-Modified: Tue, 03 Dec 2013 00:16:26 GMT
Connection: close
Vary: Accept-Encoding
ETag: “529d22da-b4″
Accept-Ranges: bytes
Test
Test
It’s working if you can read this!
”’
更正: 16-31頁,執行結果如下,已找到原因:
httpHeader宣告:
Host:與{host}中間,”:” 與 “{“ˋ中間要留一個空白。
非常感謝Ritchie的經驗分享!
thanks,
jeffrey
這幾天又測試了16-31頁,發現:
Host:與{host}中間,”:” 與 “{“ˋ中間要留一個空白。
執行結果又失敗了,所以上次正常執行只是巧合。
FYI
趙老師您好
在超圖解Python物聯網p17-10提到, 在HTTP 1.1版標頭欄的Connection預設為Keep-Alive, 所以在一次client與server的連線中會進行多次的client請求與server回應才會將連線關閉
這裡有一個問題想請教您
Q: 請問連線是指socket連線嗎?
Note: 如果上述是對的, 也即該連線是指socket連線, 那麼我試過在server回應標頭欄的Connection也設為Keep-Alive, 並在第一次請求後故意不將該client的socket物件給close掉, 但在這之後我就收不到任何client請求了。我想實現看看Keep-Alive的機制, 是否有哪個環節我搞錯了呢?
再麻煩老師您解惑了, 查了好多資料試了好多次都沒有成功QQ
底下是取得client的socket物件的局部程式碼, 也是改自您的範例程式
client = s.accept()[0] #accept client socket
while True:
print(“接受client socket : “, client)
handleRequest(client) #handle client
#client.close()
#gc.collect()
不,連線指的是底層的TCP連線,socket是在連線上面傳遞的訊息內容。
如果你想讓用戶和伺服器端的連線保持暢通,即時交換訊息的話,可以採用WebSocket技術;BetaRavener先生寫了ESP8266適用的MicroPython Websocket伺服器,範例檔名是websocket_demo.py,執行之前要先連同test.html, ws_connection.py和ws_server.py檔一起上傳到ESP8266。
thanks,
jeffrey
趙老師, 您好,
我今天購買這本書,
針對封面提到的,
‘D1 mini (ESP8266) 控制板 (已焊好針腳) 購買網站 http://www.flag.com.tw/FM999D.asp‘
上面網址無法進入,
其實, 我的重點是, 除了上述建議網址可購買ESP8266相關產品之外,
您有無其他推薦的建議的網址 ?
旗標的編輯說,他們已經把商品移到蝦皮商城的這個「D1 mini(ESP8266) 控制板」頁面。
另外,台灣樹莓派公司應該也有單獨販售控制板,請參考:《超圖解 Python 物聯網實作入門:使用 ESP8266 與 MicroPython》零件清單
thanks,
jeffrey
趙老師, 您好,
請問我有個想法如下,
ESP8266用在我的主程式,
我的主程式大致說明如下:
1.用到lib:
Pyvisa, 控制測試儀器行為.
Pyserial, 讀取待測物的 comport log, 並寫入指令.
2.主程式流程, 先 Pyvisa 控制測試儀器再 Pyserial 讀取/寫入待測物的 comport.
我的需求: 希望能把 ESP8266 的控制程序 (預計控制伺服馬達) 加進上述主程式流程的 Pyvisa 與 Pyserail之間,
不知這該怎麼做 ? 或是有個研究方向?
抱歉, 因只大致看過你書中的應用, 並無看到上述的應用, 所以發訊息詢問.
1. 書本或單一網站不可能囊括所有專案和應用,而且大多數人都沒有監控高端儀器的需求。
2. 如果是尚未熟悉程式語法或控制板的輸出入控制,建議從基本著手。
3. 先完成一小部份功能,再把它們組合起來。例如,先寫好把序列埠資料寫入log文字檔的功能,接著嘗試讀取、解析log檔、然後處理log資料,像是依照資料內容控制伺服馬達…
thanks,
jeffrey
趙老師, 您好,
其實上述是我工作上有用到的應用,
目前我只剩下ESP8266的控制程式合進我的主程式 (主程式已經完成),
有先在網上搜尋類似案例,
作者是用tkinter控制GUI控制步進馬達,
如下連結,
https://www.wolfaiottw.com/python-tkinter-gui%e6%8e%a7%e5%88%b6%e6%ad%a5%e9%80%b2%e9%a6%ac%e9%81%94/
他是用pyserial把string轉byte再傳給控制板,
只是這方法您是否有試過可用在ESP8266 ?
了解,所以問題聚焦在「微控器序列通訊」。UART是共通規範,所以每個控制板的連線方式都一樣,資料也都是以一個個位元組(byte)方式序列傳遞;跟你使用的控制板和程式庫無關。
你可以自訂序列資料格式,例如,假設從電腦端發送兩個伺服馬達的轉動角度資料,資料格式可像這樣,兩個角度值中間用逗號區隔,最後用‘\n’字元結尾:
“馬達1角度,馬達2角度\n”
控制板收到資料之後,拆解出其中的角度值即可控制伺服馬達。
thanks,
jeffrey
趙老師, 您好,
關於你提供的建議,
我應該會朝兩個UART port控制的方向來寫程式,
1. 我的DUT(待測物) 有 UART TX/RX port, 已佔一組 COMport, 負責讀log與寫入指令用途.
2 .ESP8266, 也會佔一組 COMport, 接收來自PC端的控制訊號.
這幾天在找我空閒時再試試,
謝謝
課本範例diy17_2.py執行後,用瀏覽器瀏覽時會出現下列錯誤:
Web server is running.
Traceback (most recent call last):
File “”, line 54, in
KeyError: temp
發現必須把主程式中無窮迴圈的client.send(…)中.format的參數設為(temp=temp, humid=humid),如下所示,採可正常執行:
client.send(httpHeader.format(temp=temp, humid=humid))
此外: 副程式readDHT()的回傳值是tuple: return (t, h),建議主程式在呼叫時也應把回傳值存到tuple,如下,(雖然沒有存到tuple也可以正常執行)。
(temp, humid) = readDHT()
非常感謝Ritchie的糾錯。
thanks,
jeffrey
我將書籍中所13-19~13-26都做過一次無誤,但掃描I2C也是空集合
上傳程式碼執行也是正常但馬達不動,爬了大家的問題,將wemotor.py點開後發現這一段
針對書籍中提供範例的wemotor.py裡面寫到
class Motor:
def __init__(self, motor, i2c, address=0x30, freq=1000, standbyPin=None):
當中的freq=1000是不是有誤?
是否需要改為100000後重新用ampy放入D1 mini中
1000是PWM的頻率,跟I2C通訊無關。請問你的馬達控制板有燒錄韌體嗎?
thanks,
jeffrey